Creo传承了Pro/E的运动骨架功能,该功能解决了传统的由上而下设计技术组装移动元件较困难情形,可以方便的对结构进行运动仿真。本作品运用该功能进行设计。
首先在运动骨架中对该机构的运动原理进行草绘。
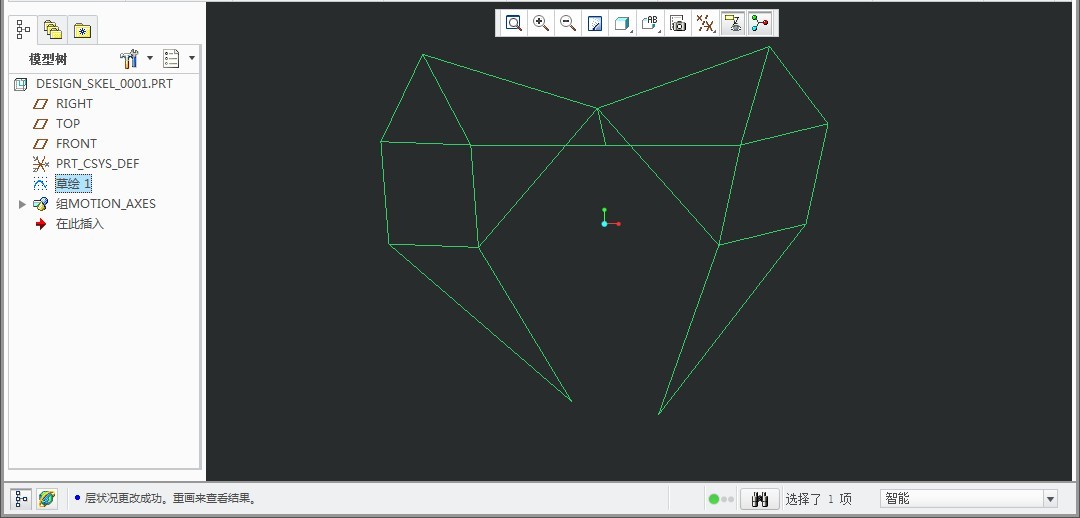
图3 机构草绘
运动骨架创建完成后,对各个主体进行定义,定义好各个部件的连接方式。
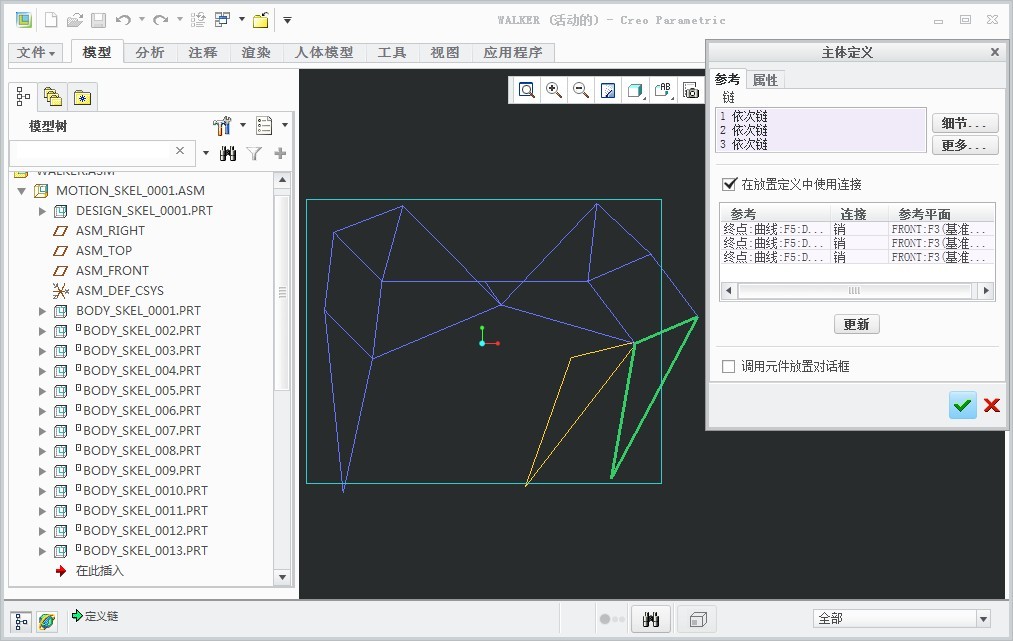
图4 机构主体定义
完成主体定义后进入机构模块,插入2组该机构,定义好伺服电机,并设置2组的起始角度差值为180°对机构运动进行仿真。
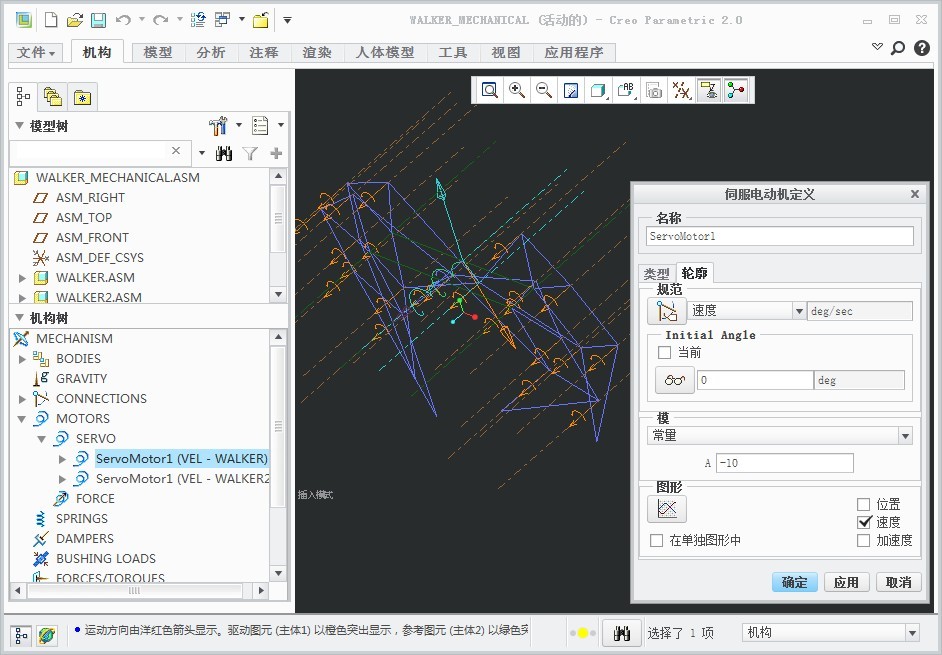
图5 伺服电机1定义

图6 伺服电机2定义
1 机构稳定性验证
对2组机构下的4个足部离伺服电机垂直方向距离数据进行采集(以伺服电机所在平面为0平面)。其中1、2代表的是前面一组机构的前后足离伺服电机垂直方向距离,3、4代表的是后面一组机构的前后足离伺服电机垂直方向距离。
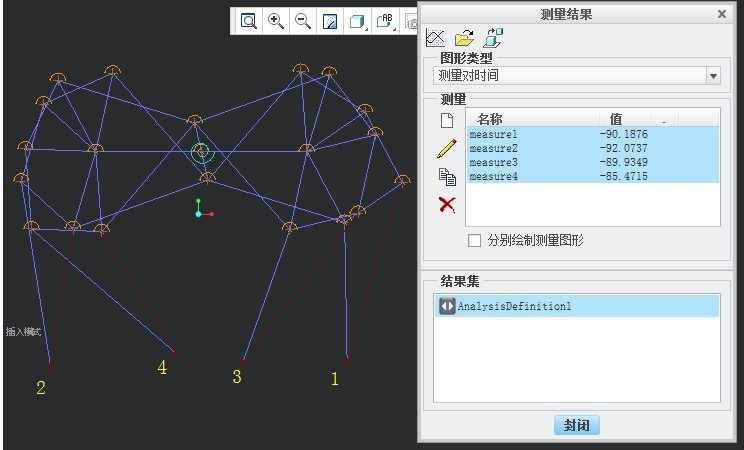
图7 测量点数据
在速度为10°/s,机构起始角度差为180°的情况下,比较前后足最低点的高度差,可看出每个运动周期(36s)有2个周期为7s的小幅度不稳定期,但整体趋于平稳,能基本满足稳定性需求。
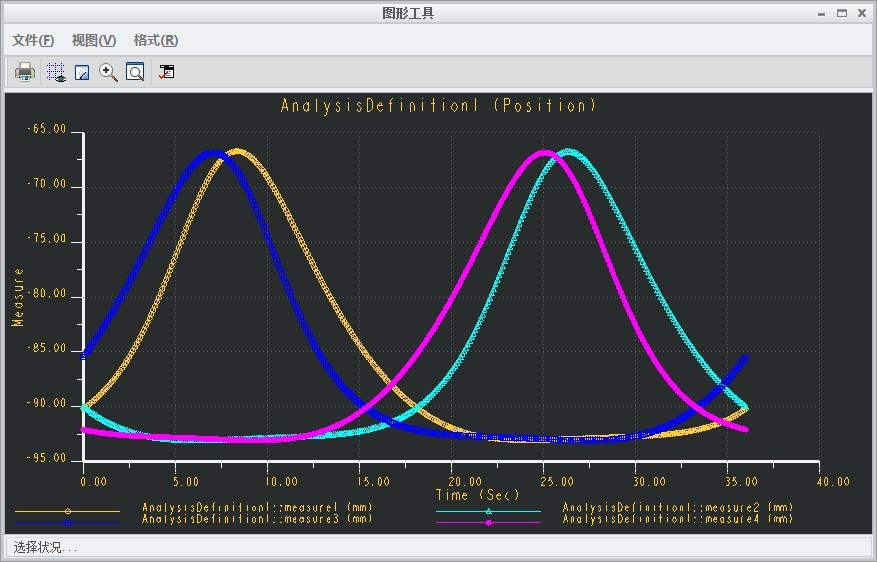
图8 机构运动测量图形
2 机构运动轨迹验证
通过对机构运动轨迹的分析,与Jansen Walker机构的轨迹比较,基本一致。
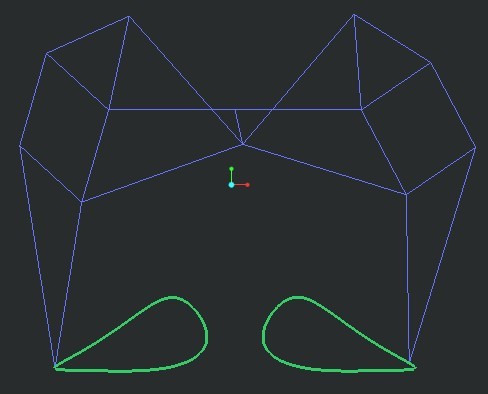
图9 机构运动轨迹分析

图10 Jansen Walker实际运动轨迹
3 机构零件的建立
完成机构验证后,即可对零件结构进行建立。
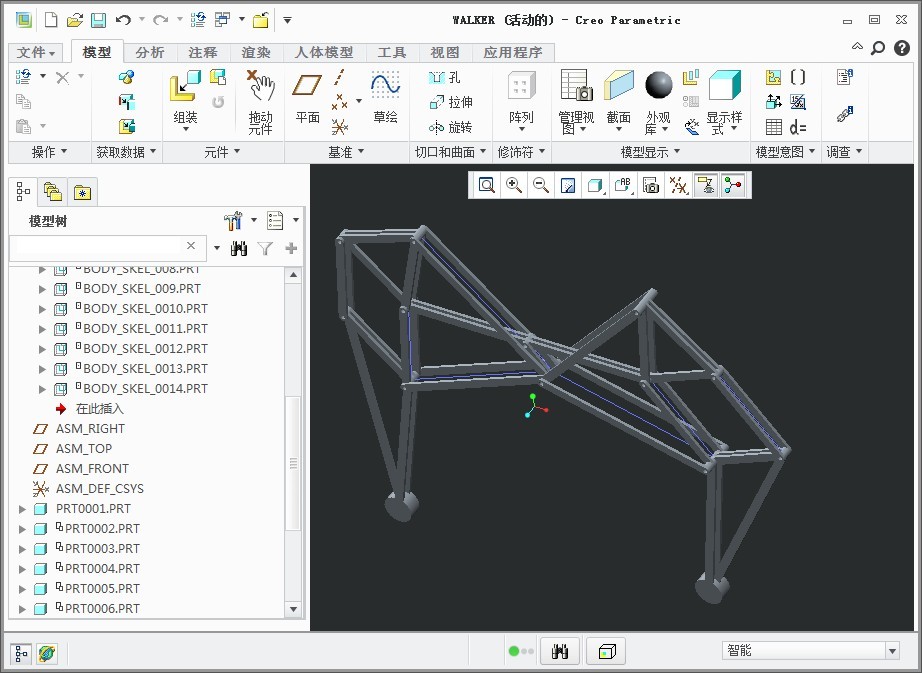
图11 机构零件建立
考虑到后续并联多个此单元机构组合而成,将其优化成以下结构。
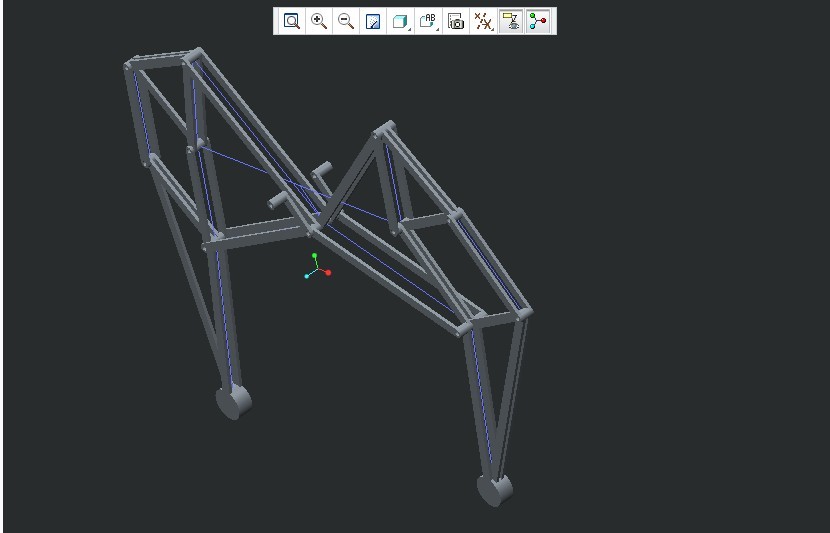
图12 机构零件优化
4 整体结构完善
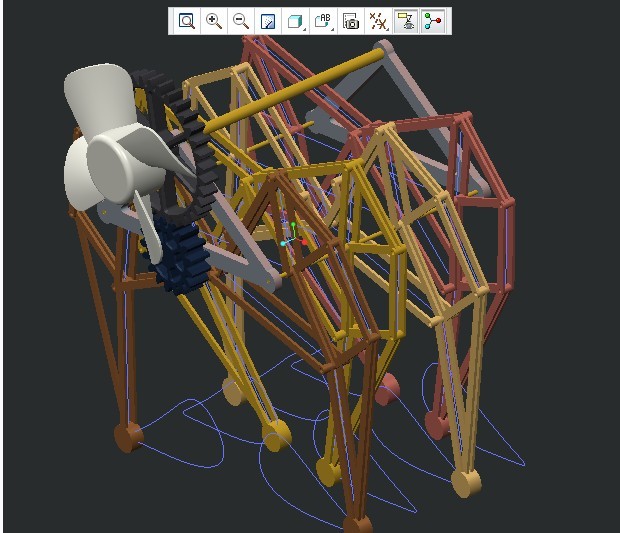
图13 整体结构完善