滚动轴承是现代机器中广泛应用的部件之一,它是依靠主要元件间的滚动接触来支撑转动零件的。
真实的轴承模型较复杂,在实际应用中,通常建立简化的轴承模型,即刚性连接、柔性连接和MPC算法。
10.5.1 刚性连接
图10-13所示为轴承连接简化模型-CERIG。一组CERIG连接孔的中心(MASS21单元)与孔内节点,耦合所有自由度;另一个CERIG连接MASS21与梁单元的端点(主、从节点的选择并不重要),且放开ROTZ自由度(见图10-14,不勾选dof6)。
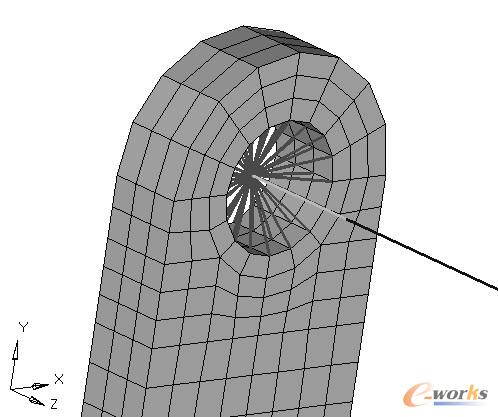
图10-13 轴承连接简化模型-CERIG
注意:刚性连接(CERIG)基于小变形理论,用于大变形分析时应谨慎。由于形成刚性区域可能引起局部应力集中,应小心使用。

图10-14 刚性连接-放开ROTZ自由度
10.5.2 柔性连接
柔性连接(RBE3)较简单,只需一组RBE3,如图10-15所示。对于轴承连接,需要注意的是必须放开主节点(梁单元的端点)一个转动自由度。例如,对于图10-15所示的轴承连接,需放开ROTZ自由度(见图10-16,不勾选rotz)。

图10-15 轴承连接简化模型-RBE3

图10-16 刚性连接-放开ROTZ自由度
注意:柔性连接(RBE3)基于小变形理论,用于大变形分析时应谨慎。
10.5.3 MPC算法
相对于刚性连接和柔性连接,MPC算法较复杂。需定义一个目标单元PILOT (位于梁的端点)和一组接触单元CONTA173/CONTA174(覆盖于实体单元表面),并设置相应的单元选项和实常数,如图10-17所示。
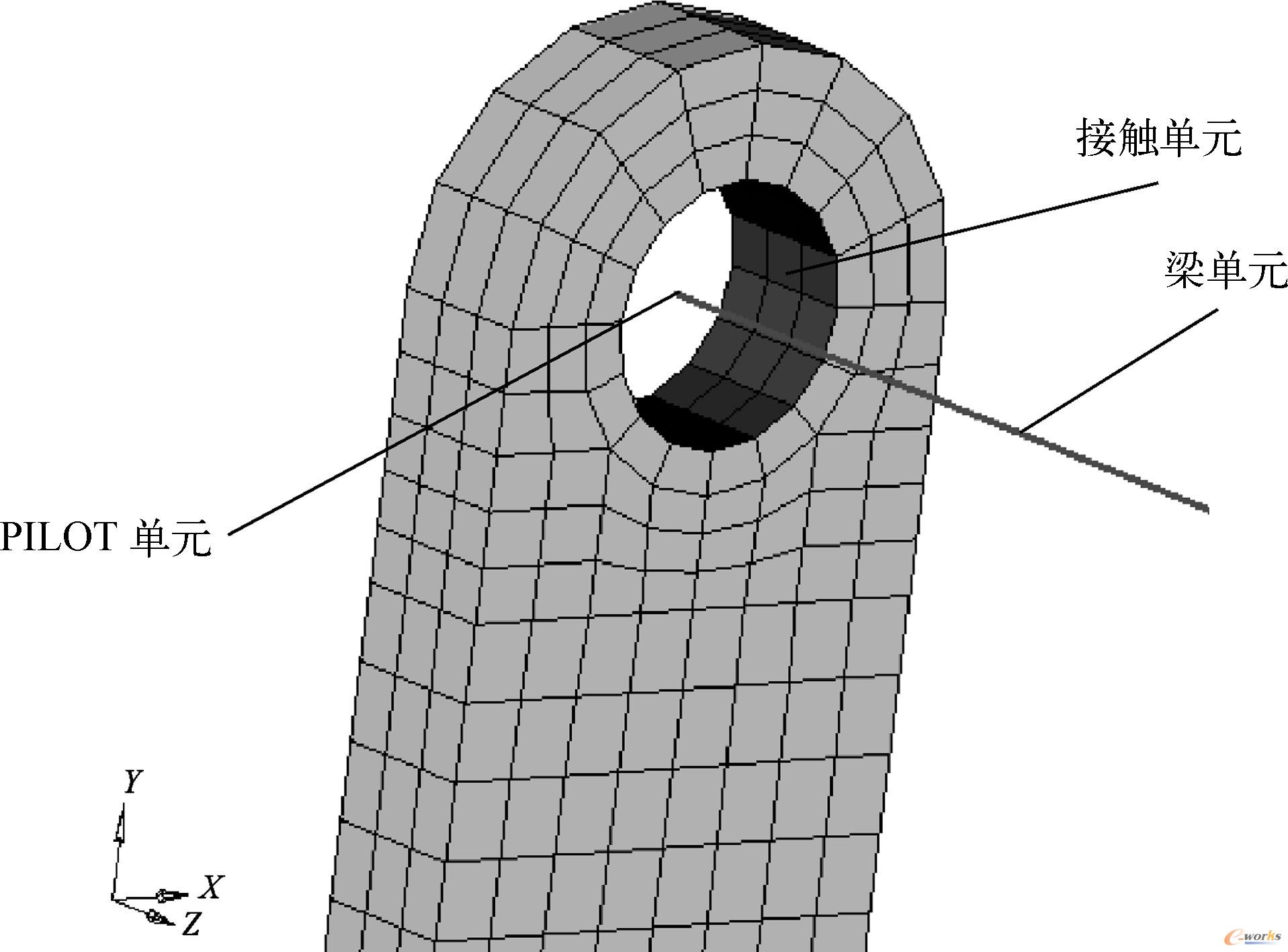
图10-17 轴承连接简化模型-MPC算法
(1)单元选项
对于目标单元TARGE170,推荐采用如下设置:
K2=1 (Specified by user)
对于force-distributed constraint MPC算法,K4用于控制PILOT点的自由度。对于图10-17所示的轴承连接,应设置K4=011111,表示放开ROTZ自由度,选中ROTY、ROTX、UZ、UY、UX自由度,如图10-18所示。
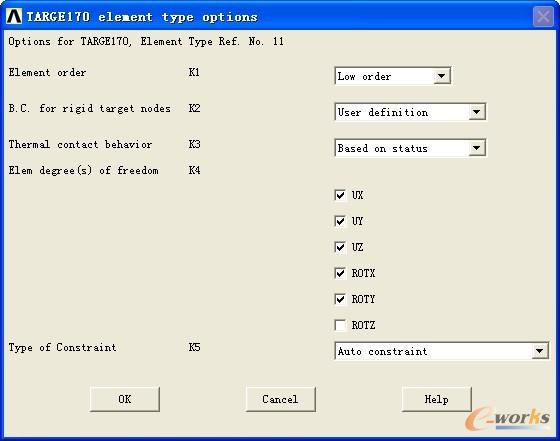
图10-18 设置TARGE170单元选项
对于接触单元CONTA173/CONTA174,推荐采用如下设置:
K2=2 (Multipoint constraint (MPC))
K4=1 (force-distributed constraint)
K5=1 (Close gap with auto CNOF)
K9=1 (Exclude both initial geometrical penetration or gap and offset)
K11=1 (Include)
K12=5 (Bonded (always))
(2)实常数
一般地,保持所有默认值可满足工程需要。
注意:对于图10-17所示的轴承连接,MPC算法应使用force-distributed constraint,不能使用rigid surface constraint。
10.5.4 轴承连接算法对比
第10.5.1~10.5.3小节的轴承连接模型可模拟轴承转动,适用于装配体分析。实际上,在分析结构承受轴承力的静态响应时(不考虑轴承的转动),也可采用表10-1中的轴承力加载方法。
表10-1 轴承连接算法的对比

通常认为轴承本身刚度较大,因此,刚性接触算法最接近实际情况(见图10-19)。将其余算法与刚性接触算法对比,可知:
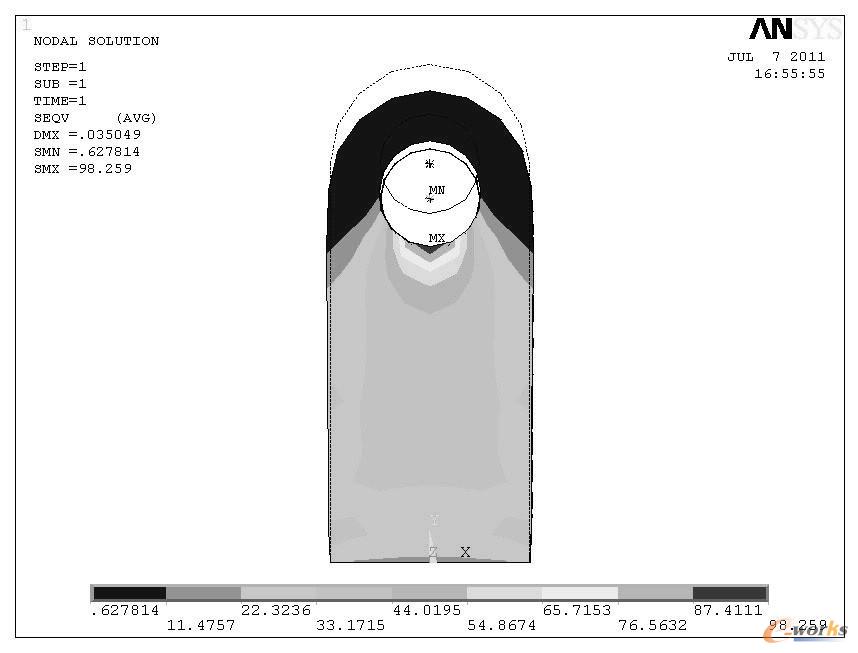
图10-19 结构应力云图-刚性接触施加轴承力
1)RBE3算法与MPC算法(force-distributed constraint)非常接近,但它们都是柔性连接,使轴承加载面变形较大,如图10-20和图10.21所示。
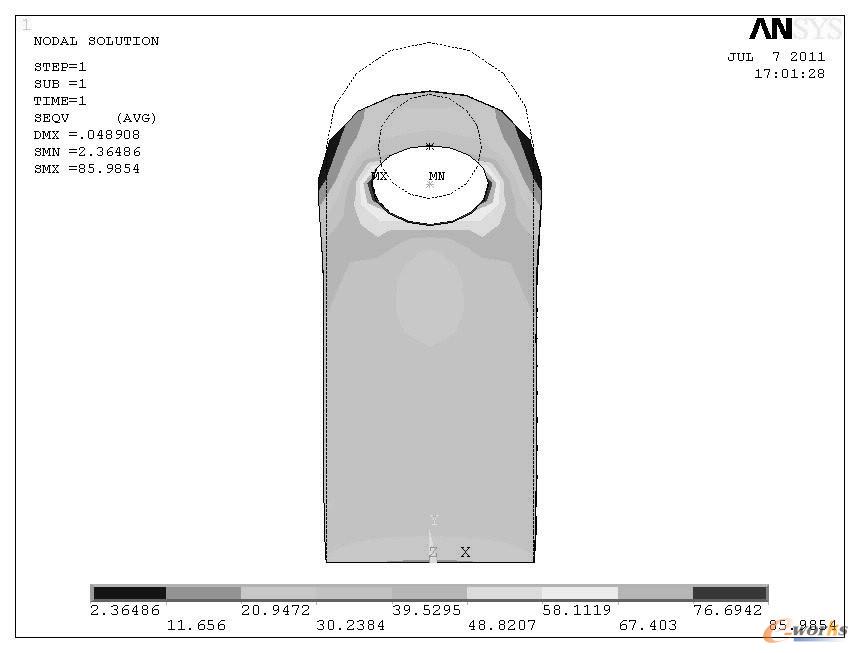
图10-20 结构应力云图-RBE3施加轴承力
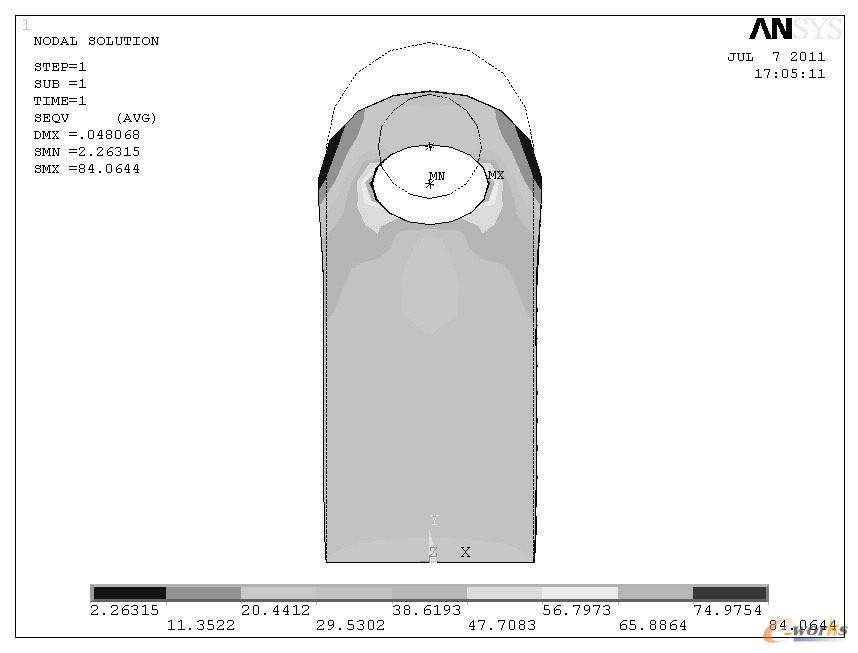
图10-21 结构应力云图-MPC算法施加轴承力
2)CERIG算法控制轴承加载面为刚性面,使轴承加载面变形偏小,如图10-22所示。
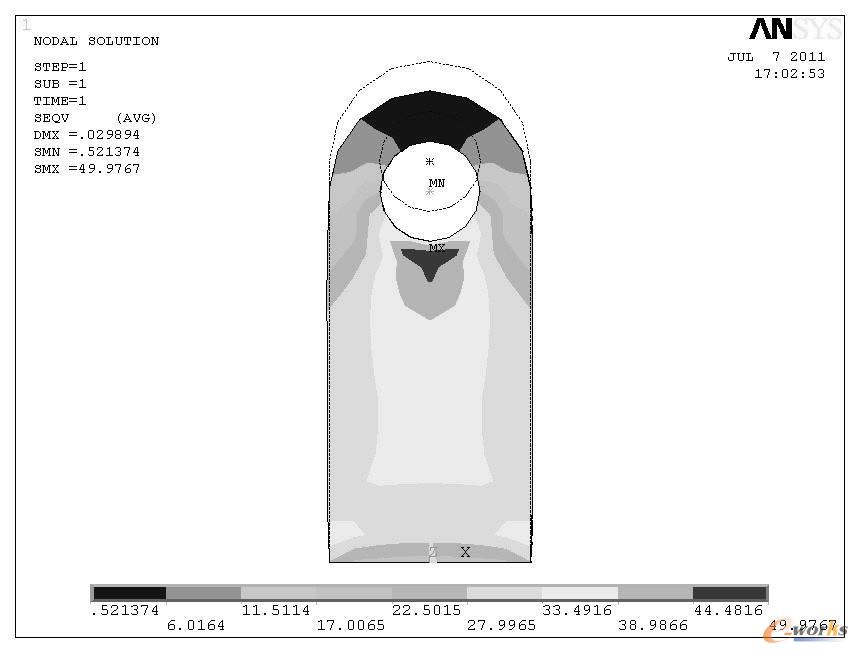
图10-22 结构应力云图-CERIG施加轴承力
3)每种轴承连接模型均是简化模型,应根据实际情况合理选择轴承连接模型。
ICP经营许可证:鄂B2-20080078
(于2003年首获许可证:鄂B2-20030029)
鄂公网安备:420100003343号
© 2002-2025 武汉制信科技有限公司 版权所有
投诉举报电话:027-87592219
















 需求中心
需求中心 AI助手
AI助手
 联系我们
联系我们