




第一十八章 耦合分析典型实例
第一节 压电材料与控制装置的强耦合模型
18.1.1 模型描述
如图18-1所示结构,外部环型结构为激励控制部件,其在外力作用下变形产生挤压效应。结构中间横梁为压电材料,其在控制部件的挤压下产生电势差。
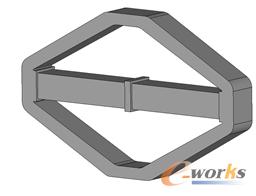
图18-1 执行器压电结构
18.1.2 分析目标
线性静力分析。
耦合系统的模态分析。
耦合系统谐响应分析。
耦合系统瞬态响应分析。
18.1.3 线性静力分析
将分析压电材料对指定常电压的反应,同时也会得到环形激励控制部件的变形。
1.模型处理及准备
(1)打开SAMCEF Field软件。
(2)在求解模块Solver Driver Setting对话框中进行如下设定。
Domain=Piezeoelectric Analysis
Solver=oofelie
Analysis type=Linear Static
(3)单击工具菜单File中的Import geometry,在弹出的Input对话框中,直接进入SAMCEF Field安装路径下的Example文件夹,选择brep\piezoelectrics\Actuator.brep,单击“Open”导入模型。
(4)单击工具菜单File中的Save As将文件另存到一新的工作路径中。
2.建立分析数据
单击“Analysis Data”按钮进入分析数据定义模块。
(1)几何属性和材料属性。我们先来定义两个非压电部分的属性,对于本例来说就是外部的环和两个压电体中间的连接部分。
1)在数据树或3D显示区域选择“Actuator”,单击工具栏中的“Behavior”几何属性定义按钮,在几何属性定义对话框中,几何类型(Behavior)选择体,对象选择类型(Place on)选择Solid。几何属性(Type)选择柔体Flexible,在3D显示区域选择以下两个高亮显示部分作为Flexible Part(如图18-2所示)。
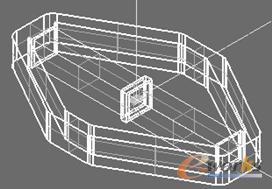
图18-2 非压电部分的选择
2)单击工具栏中的材料特性定义按钮,Place on仍旧选择上面提到的两个实体,材料特性定义对话框中进行如下定义。
- Type : Isotropic
- Young modulus : 2.1e11 Pa
- Poisson ratio : 0.3
- Mass density : 7800 kg/m³
在Oofelie定义材料特性时,和结构分析中定义材料有一定区别,对于一般线弹性本构模型,只需给出弹性模量、柏松比以及材料的密度。
接下来我们来定义压电材料的属性。
3)仍旧单击工具栏中的“Behavior”几何属性定义按钮,几何类型(Behavior)选择Oriented Volume导体,对象选择类型(Place on)选择“solid”。导体类型(Type of Orientation)选择Transverse Isotropic(横向同性)。Transverse Isotropic Direction选择X轴方向,选择图18-3中的高亮部分,单击“Apply”确认,如图18-3 a所示。
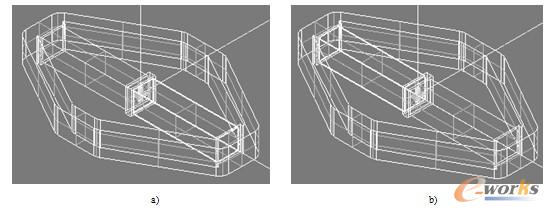
图18-3 压电部分的选择
4)保持其他不变,再选择图18-3b中高亮部分,单击“Transverse Isotropic Direction”后的反向控制按钮,单击“Apply”确认操作。
在定义压电体几何特性时,需确定导体几何类型,其电势方向一般为横向同性面的法向。当向给定反向导电方向,可以选择反向按钮进行操作。
5)选择主菜单File中的Import Data,进入SAMCEF Field的安装目录,选择Data文件夹,找到PZT4材料数据(如图18-4所示)。单击“Apply”确认。此时,数据树中的Data Library中可以双击PZT4查看材料数据,并可以对材料数据进行相应的修改,在“data library”中的材料数据可被模型中的任意“Part”引用。
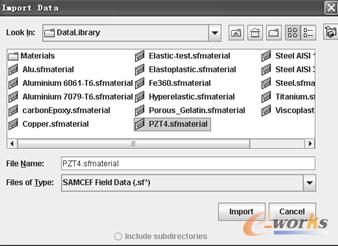
图18-4 导入的材料数据
6)选择部件,并进入材料特性定义模块,选择两块导体。并在材料特性定义窗口选择Bound to。选择PZT4,单击“Apply”确认定义。
<Bound to>可以有效灵活的管理材料特性,当在数据树中“Data library”的材料数据改变时,所有赋予了该材料特性的对象的材料特性也随之改变。
(2)边界条件的加载。
1)选择部件,并单击“Constrain”进行边界条件的加载,将边界条件类型Constraint设定为全约束Clamp,将施加对象Place on设定为“face”。在3D显示区域选择如图18-5所示的高亮显示的面,单击“Apply”确认选择。
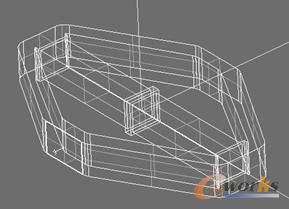
图18-5 约束类型为Clamp的面
2)选择模型,仍旧单击Constraint定义边界条件。在边界条件定义对话框中选择,约束类型为Null Potential,选择如图18-6所示的高亮显示的面,并单击“Apply”确定。
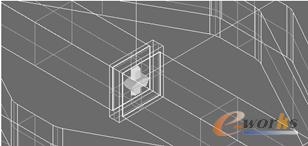
图18-6 约束类型为“Null Potential”的面
可以按<Ctrl>键与鼠标组合进行旋转、放大/缩小操作,并将鼠标放置于面的几何中心附近更容易找到要选择的面。
3)选择模型,再次并单击“Constraint”。在边界条件定义对话框中,将边界条件类型设定为电势差Prescribed Potential,电势差值输入110V,选择如图18-7所示的高亮显示的面。
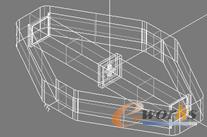
图18-7 约束类型为Prescribed Potential的面
3.网格划分
选择“Mesh”按钮进入网格划分模块。
(1)在数据树中或在3D显示区域选择模型,单击工具栏中的网格尺寸定义按钮“Length”。在网格定义菜单内,将网格平均尺寸定义为0.5mm,单击“Apply”确定网格尺寸定义。
(2)单击工具栏中的网格类型定义按钮“Element Type”,在网格类型定义菜单中将单元形状Shape设定为四面体Tretahedron,将单元规格Order设定为二次单元Parabolic,生成法则设为自动生成Automatic Choice,如图18-8所示,单击“Apply”按钮确认。

图18-8 定义网格类型
SAMCEF可以根据模型的几何情况,生成六面体,五面体,四面体,四边形,三角形,梁单元,点单元等不同类型的网格,这些网格均与体相关。
(3)单击工具栏中的生成按钮“Generate”,在生成网格对话框中直接单击“Apply”生成有限元网格,如图18-9所示。
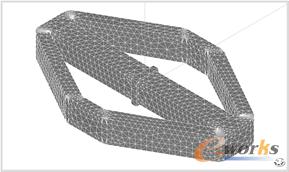
图18-9 网格图
4.提交计算
(1)单击“Solver”按钮进入求解模块。
(2)单击工具栏中的提交按钮“Convert and Launch”进行作业提交,在作业提交窗口设定求解路径,作业名称以及求解器路径。
(3)提交进行计算。
5.后处理
(1)单击后处理按钮“Result”进入后处理模块。
(2)在数据树中选择Results子目录,并选择Nodel Displacement,可以看到如图18-10所示的结果。
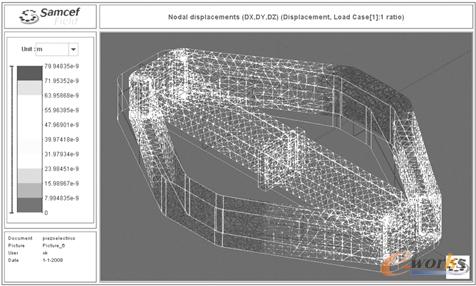
图18-10 节点位移
在查看结果以前,可以先将网格数据或几何数据隐藏,以便更好地观察结果云图。
(3)在数据树中,会有各种结果数据,进行相应选择可以得到不同的结果。保存结果以便下节利用。
18.1.4 模态分析
1.建立新的分析数据
(1)继续上面的操作,在数据定义模块改变分析类型和物理数据。在工具栏中单击按钮,在Solver Driver Setting对话框中更改Analysis Type为Modal。
这时会弹出一个警告对话框提示你“Prescribed Potential”约束条件已经不可用,可以关闭它。当求解器设置已经改变后,你会看到“Prescribed_ Potential_on_2_faces_of_Actuator”约束条件变成了橙色,意思就是不再可用了,可以把它修改成本分析可用的约束。
(2)双击约束“Prescribed_Potential_on_2_faces_of_Actuator”,会弹出对话框提示你可以改成其他约束,单击“OK”按钮,约束类型改成Isopotential。
2.求解模态
进入求解模块,在求解设置时选择模态阶数时输入20,提交计算。
(1)进入后处理模块,在数据树中单击“nodal displacements”,将会显示第一阶模态的节点位移,单击工具栏中按钮,你可以查看任意阶模态。如图18-11所示为第19阶模态。
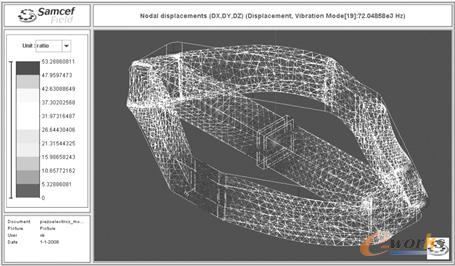
图18-11 第19阶模态
(2)查看电势,在数据树中选择Electric potential,同样也可以查看各阶模态下设备的电压和变形。如图18-12所示为第11阶模态下的结果。
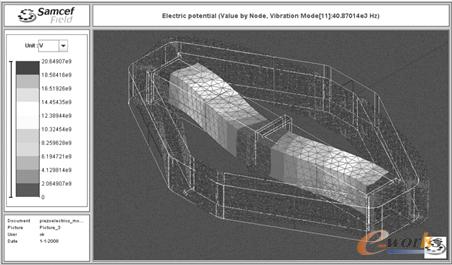
图18-12 第11阶模态下的电压和变形
18.1.5 谐响应分析
这个阶段来分析设备在频率范围的真实情况,它作为传感器而不是激励器,主要的激励是指定的位移而不是电压(即相当于已知位移求它的电压值)。这里仍旧使用上节的模型,只需要重新定义分析数据。
1.建立新的分析数据
(1)更改分析类型。继续上面的操作,在数据定义模块改变分析类型和物理数据。在工具栏中单击按钮,在Solver Driver Setting对话框中更改Analysis Type为“Harmonic Response”。
(2)设置阻尼。双击数据树中材料属性“Elastic on 2 solids of Actuator”,在阻尼选项中选择结构阻尼(Structural damping),输入值为0.01。
(3)设置激励。单击约束按钮“Constraint”,约束类型选择指定位移(Prescribed Displacement),在Displacement Value实部输入1mm,虚部输入0mm。选择Z方向作为施加方向,选择如图18-13所示的高亮部分作为施加面。
图18-13 激励作用面的选择
2.求解模态
在求解模块,在求解设置中Harmonic Data面板输入如下参数并提交计算。
-Initial Frequency : 10000 Hz
- End Frequency : 20000 Hz
- Frequency Step : 400 Hz
- Resolution Technique : Coupled Modal Superposition
- Type of Solver : Upper Frequency
- Upper Frequency : 50000 Hz
在此使用的是耦合模型混合技术,主要是加速了计算过程。这种计算方法不是最精确的,但是在以上这种低阻尼的情况下已经足够了。
3.查看结果
进入后处理模块,在数据树中单击“Electric Potential”,在弹出的对话框中单击按钮,进行如下设置:
- Complex result : Complex to Real
- Complex Criteria : Magnitude
- Criteria result : Scalar
- Predefine Criteria : Value by node
显示网格,然后单击按钮,在3D显示区域单击一个节点,如图18-14所示的点,在Function Dialog窗口里单击“Compute Functions”,可以显示相应频率的电压曲线(如图18-15所示)。
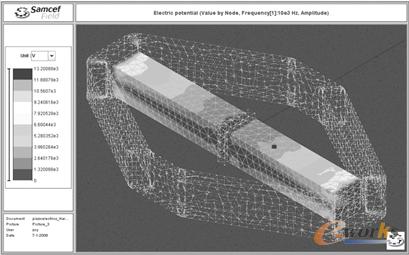
图18-14 选择节点
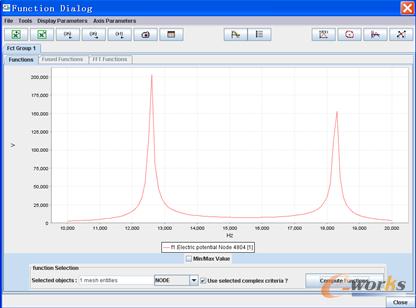
图18-15 相应频率的电压曲线
当执行器以有关的模态被激励时,可以看到在一些频段范围内有一些电压峰值。当只描述设备的轴向位移时,可以看到设备的电压敏感位置,同时它作为位移传感器也可以观察到横向位移。
18.1.6 瞬态分析
最后分析设备在可变电压下的响应和观察由它产生的电压,在做这个分析的时候假设18.1.5节的谐响应分析已经完成,所以这里读取文件并另存为“Actuator_transient”,接下来建立新的分析数据。
1.建立新的分析数据
(1)更改分析类型。继续上面的操作,在数据定义模块改变分析类型和物理数据。在工具栏中单击按钮,在Solver Driver Setting对话框中更改Analysis Type为Trans- ient Response。
这里将会弹出警告信息:分析数据与现在的分析是不兼容的。在改变求解类型以后那些分析数据就不可用了。这是因为在原来的线性静力分析数据可能有单一数值现在都需要变成时间的函数。
(2)设置阻尼。双击数据树中材料属性“Elastic on 2 solids of Actuator”,在阻尼种类选项中选择粘性阻尼(Vidvous damping),在刚度比例因子(Stiffness Proportionality Factor)中输入值为0.001,单击“OK”按钮。
(3)设置载荷。双击数据树中材料属性Prescribed_Displacement_on_1_face_of_ Actuator,单击鼠标右键,选择ignore,再双击数据树中的“Isopetential”,会弹出Edit Used Data:Constraint对话框,在Constraint中选择Prescribed Potential,在值(Value)选项中选择多点函数(Multi- Point function)按钮,单击“Edit”,输入如图18-16所示的值。
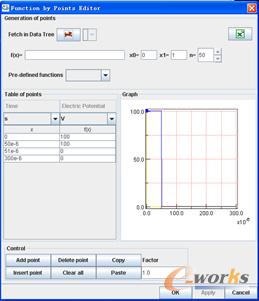
图18-16 多点函数输入位移值
2.求解
在求解模块,在求解设置中Transient data面板输入如下参数并提交计算
- Simulation Time Interval : 0.12 ms
- Integration Time Step : 2e-3 ms
3.查看结果
(1)在数据树中单击“Nodal displacements”,单击鼠标右键并选择Result Display Attribute中的Deformation Amplification,设置变形(Deform)为True并且填入系数(Coefficient)值为10e3。现在“Reference”对话框中观察设备随时间变化的变形时,变形就是很明显地并在网格上会有不同的颜色表示。
(2)与谐响应分析一样,这里也可以观察压电材料节点上的电压随时间的变化,如图18-17所示为一点的电压随时间的变化曲线。
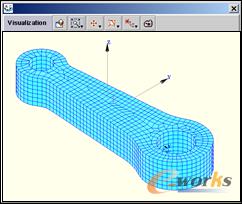
图18-17 某一点的电压随时间的变化曲线
SAMCEF有限元分析与应用实例
- 作者:
- 周传月
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2009-01-01
- 定价:
- ¥60.00
- 京东价:¥52.80

实际售价以e-works战略合作伙伴当日售价为准