




第二十四章 转子动力学分析
第三节 建立转子动力学模型
建立模型的基本方法和网格划分的基本方法在前面已经详细讲解过了,本节将具体讲解与转子动力学相关的知识点。
24.3.1建立模型
当建立转子动力学分析模型时,最重要的是把旋转部件和不转动部件分开。
24.3.2建立轴承模型
实际转子的支撑不是刚性的,都具有一定的弹性。在Jeffcott模型中把支撑处理成刚性,是认为支撑刚度要比转子本身的刚度大得多,以至于支撑在动反力作用下的变形量要比转子的动挠度小得多,在分析转子涡动中可以忽略不计。对于支撑刚度不比转子刚度大得多的情况,自然必须考虑它的影响。在某些动力机械(如大型火力发电机组)系统中,支撑日趋柔软,使得在转子涡动分析中考虑支承弹性越加重要。
考虑支承弹性后,转子的盘心进动轨迹是一个椭圆,出现两个临界 和 。当转子以这两个临界转速以外的角速度运行时,发生正涡动;在它们之间运动时,发生反涡动。临界转速的大小不仅与转子轴的弯曲刚度有关,而且还取决于支撑特性,尤其在两者的刚度量级接近时。在实际转子的运行中,大多观测到的是正涡动。这是因为支承特性虽然在水平和垂直方向上有差别,但是差别不是很大,故对应的两个临界转速靠得较近。不管接近哪个临界转速运行,都会使转子轴产生很大的动挠度。为了运行安全,不允许转子在这两个临界转速之间停留,而是很快地加速冲过这个区域。因此一般看不到稳态的反涡动,而只看到在这一转速区域之外的正涡动。为了模拟轴承,旋转最合适的单元类型,如表24-2所示。
COMBIN14单元允许在一个方向设置刚度或阻尼特性。下例给出了如何在X方向设置轴承的刚度系数KX和阻尼系数CX:
KX = 1.e+5 !刚度值
CX = 100 !阻尼值
et,1,combin14
keyopt,1,2,1 !X 方向
r,1,KX,CX
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
2. 使用COMBIN214 单元
单元COMBI214允许在平面两个垂直方向定义刚度和阻尼特性。下例给出了在YZ平面定义上轴承:
et,1,combi214
keyopt,1,2,1 ! YZ 平面
r,1,KYY,KZZ,KYZ,KZY,CYY,CZZ
rmore,CYZ,CZY
COMBI214单元允许用户定义随转速变化的轴承特性。下例给出了KYY和KZZ随转速变化:
et,1,combi214
keyopt,1,2,1 ! YZ 平面
! define table KYY
*DIM,KYY,table,3,1,1,omegs ! 定义存储3个转速的表格
KYY(1,0)= 0 , 1000 , 2000 ! 3 个旋转速度(rd/s)
KYY(1,1)= 1.e+6 , 2.7e+6 , 3.2e+6 !每一个旋转速度所对应的刚度特性
! define table KZZ
*DIM,KZZ,table,3,1,1,omegs !定义存储3个转速的表格
KZZ(1,0) = 0 , 1000 , 2000 ! 3 个旋转速度(rd/s)
KZZ(1,1) = 1.4e+6 , 4.e+6 , 4.2e+6 !每一个旋转速度所对应的刚度特性
r,1,%KYY%,%KZZ%
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
如果COMBI214单元的特性随着转速变化而变化,并且如果使用命令CMOMEGA定义组件的转速,那么就要确定单元是否为合适的旋转组件。
3. 使用MATRIX27 单元
MATRIX27单元允许用户定义12×12的刚度和阻尼矩阵,这些矩阵可以是对称或是不对称的实例如下:
et,1,matrix27,,2,4,1 ! 不对称刚度矩阵 [K]
et,2,matrix27,,2,5,1 ! 不对称阻尼矩阵 [C]
! 定义刚度矩阵
KXX = 8.e+7 $ KXY = -1.e7 ! $ 标记允许在同一行上使用多个命令
KYX = -6.e+7 $ KYY = 1.e+8
r,1, KXX,KXY $ rmore,-KXX,-KXY
rmore,KYX,KYY $ rmore,-KYX,-KYY
*do, ir, 1, 8
rmore ! 定义0值
*enddo
rmore,-KXX,-KXY $ rmore,KXX,KXY
rmore,-KYX,-KYY $ rmore,KYX,KYY
! define damping matrix
CXX = 8.e+3 $ CXY = -3.e+3
CYX = -3.e+3 $ CYY = 1.2e+4
r,2, CXX,CXY $ rmore,-CXX,-CXY
rmore,CYX,CYY $ rmore,-CYX,-CYY
*do, ir, 1, 8
rmore !定义0值
*enddo
rmore,-CXX,-CXY $ rmore,CXX,CXY
rmore,-CYX,-CYY $ rmore,CYX,CYY
4. 使用MPC184 通用铰单元
MPC184单元是一个具有弹性刚度和阻尼特性的铰单元。使用TB命令定义其6×6特性矩阵。如下例所示:
keyopt,2,4,1 !没有转动
sectype,2,joint,gene
local,11,0,4,0,0,0,0,0 !铰单元的坐标系形式
secjoin,,11
KYY = 1.e+8
CYY = 1.e+6
KZZ = 1.e+10
CZZ = 1.e+2
tb,join,2,,,stiff
tbdata,7,KYY
tbdata,12,KZZ
tb,join,2,,,damp
tbdata,7,CYY
tbdata,12,CZZ
24.3.3建立模型的其他部件
1. 添加固定部件
模型中固定部件一般为外罩、固定支撑或是法兰。为了添加固定部件,首先对这些部件划分网格。因为旋转速度仅仅施加到结构的旋转部分,所以用户需要基于旋转部件单元创建一个组件。
下例给出了如何创建旋转组件并使用命令CMOMEGA把转速施加到组件上:
! 创建模型
! 创建旋转组件
esel,,type,,1,2
cm,RotatingPart,elem
allsel
! 在旋转组件上施加转速
cmomega,RotatingPart,1000.
2. 把非轴对称部件等效为轴对称质量
如果模型是由非轴对称部件组成的,则用户可以使用以下的方法把它转换为等效轴对称质量:
1)首先使用命令VSEL选择非轴对称部件体。
2)键入命令VSUM,以便输出这些体的总体质量特性。
3)删除这些体。
4)在这些体的重心处定义一个新的质量单元(MASS21),使用实常数定义单元的质量和转动惯量,这种转换是近似的转换为轴对称的模型。例如,如果旋转速度的轴沿着X轴,并且质量存在于Y和Z方向,绕轴的转动惯量YY和ZZ是相等的。
5)使用命令CERIG在质量单元节点和其余的结构之间定义一个刚性区域。用户通过使用惯性释放计算可以获得更准确的质量、重心和惯性矩。
3. 定义多个转轴
为了定义多个转动部件,首先要对这些部件划分网格。因为每一个部件具有不同的转速,所以用户需要使用单元操作为具有不同转速的部件创建不同的组件。
下例给出了如何创建两个转动组件并使用命令CMPMEGA为这些组件定义转速:
! 创建模型
!创建第一个转动组件
esel,,type,,1,2
cm,RotatingPart1,elem
! 创建第二个转动组件
esel,inve
cm,RotatingPart2,elem
allsel
!为每一个组件施加转速
cmomega,RotatingPart1,1000.
cmomega,RotatingPart2,3000.
24.3.1建立模型
当建立转子动力学分析模型时,最重要的是把旋转部件和不转动部件分开。
- 把旋转速度施加到旋转部件上。
- 确保旋转部件是轴对称的结构。
24.3.2建立轴承模型
实际转子的支撑不是刚性的,都具有一定的弹性。在Jeffcott模型中把支撑处理成刚性,是认为支撑刚度要比转子本身的刚度大得多,以至于支撑在动反力作用下的变形量要比转子的动挠度小得多,在分析转子涡动中可以忽略不计。对于支撑刚度不比转子刚度大得多的情况,自然必须考虑它的影响。在某些动力机械(如大型火力发电机组)系统中,支撑日趋柔软,使得在转子涡动分析中考虑支承弹性越加重要。
考虑支承弹性后,转子的盘心进动轨迹是一个椭圆,出现两个临界 和 。当转子以这两个临界转速以外的角速度运行时,发生正涡动;在它们之间运动时,发生反涡动。临界转速的大小不仅与转子轴的弯曲刚度有关,而且还取决于支撑特性,尤其在两者的刚度量级接近时。在实际转子的运行中,大多观测到的是正涡动。这是因为支承特性虽然在水平和垂直方向上有差别,但是差别不是很大,故对应的两个临界转速靠得较近。不管接近哪个临界转速运行,都会使转子轴产生很大的动挠度。为了运行安全,不允许转子在这两个临界转速之间停留,而是很快地加速冲过这个区域。因此一般看不到稳态的反涡动,而只看到在这一转速区域之外的正涡动。为了模拟轴承,旋转最合适的单元类型,如表24-2所示。
表24-2 模拟轴承的常用单元特性
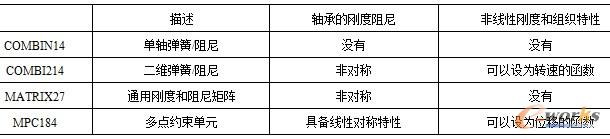
COMBIN14单元允许在一个方向设置刚度或阻尼特性。下例给出了如何在X方向设置轴承的刚度系数KX和阻尼系数CX:
KX = 1.e+5 !刚度值
CX = 100 !阻尼值
et,1,combin14
keyopt,1,2,1 !X 方向
r,1,KX,CX
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
2. 使用COMBIN214 单元
单元COMBI214允许在平面两个垂直方向定义刚度和阻尼特性。下例给出了在YZ平面定义上轴承:
et,1,combi214
keyopt,1,2,1 ! YZ 平面
r,1,KYY,KZZ,KYZ,KZY,CYY,CZZ
rmore,CYZ,CZY
COMBI214单元允许用户定义随转速变化的轴承特性。下例给出了KYY和KZZ随转速变化:
et,1,combi214
keyopt,1,2,1 ! YZ 平面
! define table KYY
*DIM,KYY,table,3,1,1,omegs ! 定义存储3个转速的表格
KYY(1,0)= 0 , 1000 , 2000 ! 3 个旋转速度(rd/s)
KYY(1,1)= 1.e+6 , 2.7e+6 , 3.2e+6 !每一个旋转速度所对应的刚度特性
! define table KZZ
*DIM,KZZ,table,3,1,1,omegs !定义存储3个转速的表格
KZZ(1,0) = 0 , 1000 , 2000 ! 3 个旋转速度(rd/s)
KZZ(1,1) = 1.4e+6 , 4.e+6 , 4.2e+6 !每一个旋转速度所对应的刚度特性
r,1,%KYY%,%KZZ%
指定关键字KEYOPT(2)的值来定义激活的自由度。单元操作在节点坐标系中完成。
如果COMBI214单元的特性随着转速变化而变化,并且如果使用命令CMOMEGA定义组件的转速,那么就要确定单元是否为合适的旋转组件。
3. 使用MATRIX27 单元
MATRIX27单元允许用户定义12×12的刚度和阻尼矩阵,这些矩阵可以是对称或是不对称的实例如下:
et,1,matrix27,,2,4,1 ! 不对称刚度矩阵 [K]
et,2,matrix27,,2,5,1 ! 不对称阻尼矩阵 [C]
! 定义刚度矩阵
KXX = 8.e+7 $ KXY = -1.e7 ! $ 标记允许在同一行上使用多个命令
KYX = -6.e+7 $ KYY = 1.e+8
r,1, KXX,KXY $ rmore,-KXX,-KXY
rmore,KYX,KYY $ rmore,-KYX,-KYY
*do, ir, 1, 8
rmore ! 定义0值
*enddo
rmore,-KXX,-KXY $ rmore,KXX,KXY
rmore,-KYX,-KYY $ rmore,KYX,KYY
! define damping matrix
CXX = 8.e+3 $ CXY = -3.e+3
CYX = -3.e+3 $ CYY = 1.2e+4
r,2, CXX,CXY $ rmore,-CXX,-CXY
rmore,CYX,CYY $ rmore,-CYX,-CYY
*do, ir, 1, 8
rmore !定义0值
*enddo
rmore,-CXX,-CXY $ rmore,CXX,CXY
rmore,-CYX,-CYY $ rmore,CYX,CYY
4. 使用MPC184 通用铰单元
MPC184单元是一个具有弹性刚度和阻尼特性的铰单元。使用TB命令定义其6×6特性矩阵。如下例所示:
keyopt,2,4,1 !没有转动
sectype,2,joint,gene
local,11,0,4,0,0,0,0,0 !铰单元的坐标系形式
secjoin,,11
KYY = 1.e+8
CYY = 1.e+6
KZZ = 1.e+10
CZZ = 1.e+2
tb,join,2,,,stiff
tbdata,7,KYY
tbdata,12,KZZ
tb,join,2,,,damp
tbdata,7,CYY
tbdata,12,CZZ
24.3.3建立模型的其他部件
1. 添加固定部件
模型中固定部件一般为外罩、固定支撑或是法兰。为了添加固定部件,首先对这些部件划分网格。因为旋转速度仅仅施加到结构的旋转部分,所以用户需要基于旋转部件单元创建一个组件。
下例给出了如何创建旋转组件并使用命令CMOMEGA把转速施加到组件上:
! 创建模型
! 创建旋转组件
esel,,type,,1,2
cm,RotatingPart,elem
allsel
! 在旋转组件上施加转速
cmomega,RotatingPart,1000.
2. 把非轴对称部件等效为轴对称质量
如果模型是由非轴对称部件组成的,则用户可以使用以下的方法把它转换为等效轴对称质量:
1)首先使用命令VSEL选择非轴对称部件体。
2)键入命令VSUM,以便输出这些体的总体质量特性。
3)删除这些体。
4)在这些体的重心处定义一个新的质量单元(MASS21),使用实常数定义单元的质量和转动惯量,这种转换是近似的转换为轴对称的模型。例如,如果旋转速度的轴沿着X轴,并且质量存在于Y和Z方向,绕轴的转动惯量YY和ZZ是相等的。
5)使用命令CERIG在质量单元节点和其余的结构之间定义一个刚性区域。用户通过使用惯性释放计算可以获得更准确的质量、重心和惯性矩。
3. 定义多个转轴
为了定义多个转动部件,首先要对这些部件划分网格。因为每一个部件具有不同的转速,所以用户需要使用单元操作为具有不同转速的部件创建不同的组件。
下例给出了如何创建两个转动组件并使用命令CMPMEGA为这些组件定义转速:
! 创建模型
!创建第一个转动组件
esel,,type,,1,2
cm,RotatingPart1,elem
! 创建第二个转动组件
esel,inve
cm,RotatingPart2,elem
allsel
!为每一个组件施加转速
cmomega,RotatingPart1,1000.
cmomega,RotatingPart2,3000.
有限元分析—ANSYS 13.0从入门到实战
- 作者:
- 张洪才,何波
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2011-9-1
- 定价:
- ¥79.00
- 京东价:¥61.60

实际售价以e-works战略合作伙伴当日售价为准