14.5.1 积分时间步长
瞬态分析求解的精度取决于积分时间步长的大小。时间步长越小,精度越高,但太小的时间步长将浪费计算资源,太大的积分时间步长将引发高阶模态响应的误差,从而影响整体响应。要想计算出最优时间步长,应遵循下列准则:
1)解算响应频率时,时间步长应当足够小,以能求解出结构的运动(响应)。
由于结构的动力学响应可以看做是各阶模态响应的组合,时间步长应小到能够解出对整体响应有贡献的最高阶模态。对于Newmark时间积分方案,已经发现当时间步长取值20倍最高频率时会产生比较合理精度级的解。也就是说,如果f表示频率(单位为Hz),积分时间步长Δt应为:

如果要得到加速度结果,可能要求更小的Δt值。
图14-3表示了Δt值对单自由度弹簧-质量系统周期延长量的影响。可以看到,当取每周20或更多个时间点时,引起的周期延长将小于百分之一。
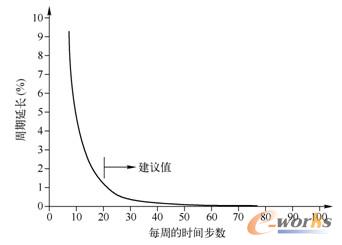
图14-3 积分时间步长对周期延长的影响
2)解算所加载荷-时间关系曲线时,时间步长应当小到足以“跟随”载荷函数。
响应总是倾向滞后于所施加的载荷,特别是对于阶跃载荷,如图14-4所示。在发生阶跃的时间点附近要求采用较小的Δt(也许小到和1/(180f )接近),以紧紧跟随载荷的阶跃变化。
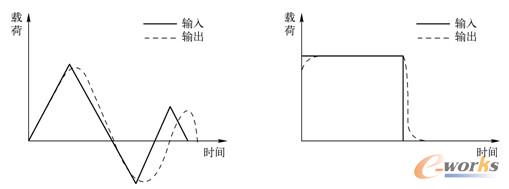
图14-4 瞬态输入/瞬态响应曲线
3)在涉及接触(碰撞)的问题中,时间步长应当小到足以捕捉到两个接触表面之间的动量传递,否则将发生明显的能量损失,从而碰撞将不会是完全弹性的。
积分时间步长可由接触频率f
c确定:

式中,k是间隙刚度;m是作用在间隙上的有效质量;n是每周的点数。
要使能量损失最小,每周至少要取30个点(n=30)。如果要得到加速度结果,可能要取更大的n值。对于缩减法和模态叠加法,应保证n不小于7,以确保求解的稳定性。如果接触时间和接触质量比整个瞬态过程时间和系统质量小得多,则可以在每周取少于30个点(n<30),因为此时能量损失对总体响应的影响很小。
4)解算非线性时,对于大部分问题,满足前面几个准则的时间步长就可捕捉到非线性行为,但也有少数例外情形:当结构在载荷作用下趋于刚化(例如,从弯曲状态变化到薄膜承载状态的大变形问题),则必须求解被激活的高阶模态,使用更小的时间步长。
用合适的准则计算出时间步长后,在具体分析中应该用最小的步长值。可以采用自动时间步长来让ANSYS决定在求解中何时增大或减小时间步长。自动时间步长将在第14.5.2节进行讨论。
注意:应避免使用极小的时间步长,特别是建立初始条件时,因为过小的数值可能引起数值困难。例如,基于计算时间大小而言,小于相对10
-10数量级的时间步长就会引起数值计算困难。
14.5.2 自动时间步长
自动时间步长(作时间步长优化)试图按响应频率和非线性效果来调整求解期间的积分时间步长。此特征的主要好处是可以减少子步的总数,从而节省计算机资源。同理,采用自动时间步长可以大大减少可能需要进行重新分析(如调节时间步长和非线性等)的次数。如果存在非线性,自动时间步长还会带来另外一个好处:适当地增加载荷并在达不到收敛时回溯到先前收敛的解(二分法)。可以用命令AUTOTS,ON激活自动时间步长。
虽然对于所有分析都激活自动时间步长似乎是一个好主意,但在有些情况下自动时间步长也可能是无益的,甚至可能是有害的:
1)只在结构的局部有动力学行为的问题(如涡轮叶片和轮毂组件等),这时系统部件的低频能量部分远远高于高频部分。
2)受恒定激励的问题(如地震载荷等),在这种情形下当不同频率被激活时,时间步长趋于连续变化。
3)运动学问题(刚体运动),在这种情形下刚体运动对响应频率项的贡献将占主导地位。
14.5.3 初始条件
在进行完全法瞬态动力学分析之前,用户需要正确理解建立初始条件和正确使用载荷步。
瞬态动力学分析包含时间函数的载荷。为了定义这样的载荷,用户需要将载荷-时间关系曲线划分成合适的载荷步。载荷-时间曲线上的每个“拐角”对应一个载荷步,如图4-2所示。
第一个载荷步通常用来建立初始条件,然后为第二个和后继瞬态载荷步施加载荷并设置载荷步选项。对于每个载荷步,都要指定载荷值和时间值,同时指定其他的载荷步选项,如采用阶梯加载还是斜坡加载方式施加载荷以及是否使用自动时间步长等。然后,将每个载荷步写入载荷步文件,最后一次性求解所有载荷步。
施加瞬态载荷的第一步是建立初始条件(即零时刻时的情况)。瞬态动力学分析要求给定两种初始条件(因为要求解的方程式(14-1)是两阶的):初始位移和初始速度。如果没有进行特意设置,和都被假定为零。初始加速度通常假定为零,但可以通过在一个小的时间间隔内施加合适的加速度载荷来指定非零的初始加速度。
下面描述了如何施加不同组合形式的初始条件。
(1)零初始位移和零初始速度
这是默认的初始条件,不需要指定任何条件。在第一个载荷步中可以加上对应于载荷-时间关系曲线的第一个拐角处的载荷。
(2)零初始位移和非零初始速度
非零速度是通过对结构中需指定速度的部分加上小时间间隔上的小位移来实现的。例如,如果初始速度为0.25,则可以通过在时间间隔0.004内加上0.001的位移来实现,命令流如下:
...
TIMINT,OFF ! 关闭时间积分效应,采用静态计算
D,ALL,UY,0.001 ! 指定小位移(假定速度为Y方向)
TIME,0.004 ! 设定时间,初始速度=0.001/0.004=0.25
KBC,0 ! 设定为斜坡加载,逐步加载强迫位移,保持恒定的初速度
LSWRITE ! 写出第一个载荷步,初始条件设置完成
DDEL,ALL,UY ! 在后续瞬态分析中删除不必要的强制位移
TIMINT,ON ! 开启时间积分效应,采用瞬态分析
...
(3)非零初始位移和非零初始速度
和(2)的情形相似,不过施加的位移是真实数值而非“小”数值。比如,若初始位移=1.0且初始速度=2.5,则应当在时间间隔0.4内施加一个值为1.0的位移,命令流如下:
...
TIMINT,OFF ! 关闭时间积分效应,采用静态计算
D,ALL,UY,1.0 ! 指定初始位移(假定速度为Y方向)
TIME,0.4 ! 设定时间,初始速度=1.0/0.4=2.5
KBC,0 ! 设定为斜坡加载,逐步加载强迫位移,保持恒定的初速度
LSWRITE ! 写出第一个载荷步,初始条件设置完成
DDELE,ALL,UY ! 在后续瞬态分析中删除不必要的强制位移
TIMINT,ON ! 开启时间积分效应,采用瞬态分析
...
(4)非零初始位移和零初始速度
需要用两个子步(NSUBST,2)来实现,所加位移在两个子步间是阶跃变化的(KBC,1)。如果位移不是阶跃变化的(或只用一个子步),所加位移将随时间变化,从而产生非零初速度。下面的例子演示了如何施加初始条件初始位移=1.0,初始位移=0,命令流如下:
...
TIMINT,OFF ! 关闭时间积分效应,采用静态计算
D,ALL,UY,1.0 ! 指定初始位移(假定为Y方向)
TIME,.001 ! 设定小的时间间隔
NSUBST,2 ! 设定两个子步
KBC,1 ! 设定为阶跃加载,即位移载荷在第一个子步达到最大
! 值(产生非零速度),第二个子步不变化(速度置零)
LSWRITE ! 写出第一个载荷步,初始条件设置完成
TIMINT,ON ! 开启时间积分效应,采用瞬态分析
...
(5)非零初始加速度
可以近似地通过在小的时间间隔内指定要加的加速度实现。例如,施加初始加速度为9.8的命令如下:
...
ACEL,,9.8 ! 施加加速度(假定为Y方向),不关闭时间积分效应,
! 采用瞬态分析
TIME,.001 ! 设定小的时间间隔
NSUBST,2 ! 设定两个子步
KBC,1 ! 设定为阶跃加载,加速度在第一个子步达到最大值的
! 一半,第二个子步达到最大值
DDELE, ... ! 删除施加加速度方向(Y方向)的约束,否则初始加
! 速度将不起作用
LSWRITE ! 写出第一个载荷步,初始条件设置完成
...
非零初始位移及/或非零初始速度也可以用IC命令进行设置,但应谨慎使用,以避免出现自相矛盾的初始条件,具体细节请参阅ANSYS命令参考手册。
14.5.4 阻尼
阻尼是用来度量系统自身消耗振动能量的能力的物理量。大多数系统中都存在阻尼,因此在动力学分析中应当指定阻尼。ANSYS可以指定如下形式的阻尼:
1)ALPHA和BETA阻尼,也称Rayleigh阻尼。
2)与材料相关的阻尼。
3)恒定的材料阻尼系数。
4)恒定的阻尼比。
5)振型阻尼。
6)单元阻尼。
7)材料结构阻尼系数。
可以在模型中指定多种形式的阻尼,ANSYS按所指定的阻尼之和形成阻尼矩阵[C]。
在瞬态动力学分析中,常用ALPHA和BETA阻尼,具体介绍如下:
ALPHA阻尼和BETA阻尼用于定义Rayleigh阻尼常数α和β。阻尼矩阵[C]是在这些常数乘以质量矩阵[M]和刚度矩阵[K]之后计算出来的,即:

命令ALPHAD和BETAD分别用于设置Rayleigh阻尼常数α和β。通常,α和β的值不是直接得到的,而是用振型阻尼比ξ
i计算出来的。ξ
i是某个振型i的实际阻尼和临界阻尼之比(简称阻尼比),通常用实验来测定。如果ω
i是第i阶模态的固有角频率(单位为rad/s),则α和β满足下列关系:

为了确定对应给定阻尼比ξ的α和β值,通常假定α和β之和在某个频率范围内近似为恒定值,如图14-5所示。这样,在给定阻尼比ξ和一个频率范围(ω
1~ω
2)之后,解两个并列方程组便可求得α和β:
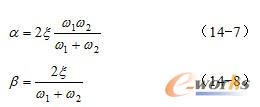
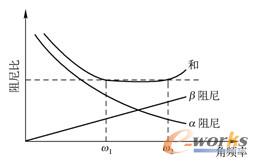
图14-5 Rayleigh阻尼
在许多实际问题中,ALPHA阻尼(或称质量阻尼)可以忽略,即α=0。这种情形下,可以由已知的ξ
i和ω
i计算出β:

由于在一个载荷步中只能输入一个β值,因此应该选取该载荷步中最主要的被激活频率来计算β值。
















 需求中心
需求中心 AI助手
AI助手
 联系我们
联系我们