




第一十五章 运动仿真
第一节 运动仿真简介
15.1.1 运动仿真模块基本功能
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力学分析和设计仿真。通过建模应用模块的功能建立三维实体模型,利用运动仿真模块的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立运动副、传动副以及约束,即可建立一个运动仿真模型。
通过运动仿真,可进行机构的干涉分析,分析零件的位移、速度、加速度、作用力、反作用力和力矩等,这些仿真的结果可以作为修改零件结构设计或调整零件材料的指导依据。
运动仿真模块自动复制主模型的装配文件,并可根据需要建立一系列不同的运动仿真。每个仿真可独立修改,而不影响装配主模型,一旦完成优化设计方案,可直接更新装配主模型,以反映优化设计的结果。
15.1.2 创建运动仿真的基本步骤
启动NX后,打开需要进行运动仿真的部件文件,单击“标准”工具栏的“开始”图标按钮 ,从打开的下拉菜单选择“运动仿真”命令,可进入运动仿真应用模块。进行运动仿真的一般步骤为。
(1)建立运动仿真场景。
(2)设置运动仿真基本参数和环境选项。
(3)创建连杆(Link)。连杆是用户选择的几何模型,一起作为整体运动的若干几何体可作为一个连杆,并可为连杆指定材料、惯量、初始位移和转速等参数。
(4)创建运动副(Joints)。运动副为相邻两个连杆的运动约束,规定了两个连杆的相对运动,因此,机构可以认为是连接在一起运动的连杆。只有为机构指定正确的运动副,才可能得到正确的运动仿真结果。
(5)创建载荷和其他运动对象(包括力、力矩、弹簧、阻尼、弹性衬套和接触单元等),并可根据需要创建运动约束(如点在线上、点在面上等约束)。
(6)指定运动驱动。运动驱动指定了控制运动的运动副参数。UG NX的运动驱动包括无驱动、运动函数驱动、恒定驱动、简谐运动驱动和关节运动驱动5种形式。
(7)创建解算方案。每个分析场景可以创建一个或多个解算方案,每个解算方案可根据需要设置不同的参数。
(8)对创建的解算方案进行仿真计算,得到仿真结果。
(9)进行仿真结果的分析。可通过动画观察机构的运动过程,并可利用图表和曲线输出运动仿真得到的位移、速度、加速度、力和力矩等。
15.1.3 运动仿真模型管理
1.创建运动场景
在进行运动仿真之前必须建立一个运动模型,而运动模型的数据都储存在运动场景中,因此运动场景的建立是整个运动仿真过程的开始。
进入运动仿真模块后,在资源栏左上角单击标签 打开运动导航器,如图15-1所示。此时在运动导航器中显示当前装配模型的名称,选择该名称后单击鼠标右键,在弹出的快捷菜单中选择“新建仿真”命令,打开如图15-2所示的“环境”对话框,根据仿真目的设置环境参数后单击“确定”按钮,可创建默认名称为“motion_1”运动场景。重复上述操作可创建多个运动场景。
2.运动场景的管理
虽然可以利用一个装配模型创建多个运动场景,但仅可有一个运动场景为工作状态。在需要时,可在运动导航器中选择某个场景,单击鼠标右键,在弹出的快捷菜单中选择“设为工作状态”命令,可将该场景激活;另外,利用鼠标右键弹出的快捷菜单,可对运动场景进行重命名、克隆和删除等操作,如图15-3所示。
3.运动场景的环境设置
如果需要改变某个运动场景的环境设置,可首先将其设为工作状态,然后选择该运动场景,单击鼠标右键,在弹出的快捷菜单中选择“环境”命令,打开“环境”对话框更改设置。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力学分析和设计仿真。通过建模应用模块的功能建立三维实体模型,利用运动仿真模块的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立运动副、传动副以及约束,即可建立一个运动仿真模型。
通过运动仿真,可进行机构的干涉分析,分析零件的位移、速度、加速度、作用力、反作用力和力矩等,这些仿真的结果可以作为修改零件结构设计或调整零件材料的指导依据。
运动仿真模块自动复制主模型的装配文件,并可根据需要建立一系列不同的运动仿真。每个仿真可独立修改,而不影响装配主模型,一旦完成优化设计方案,可直接更新装配主模型,以反映优化设计的结果。
15.1.2 创建运动仿真的基本步骤
启动NX后,打开需要进行运动仿真的部件文件,单击“标准”工具栏的“开始”图标按钮 ,从打开的下拉菜单选择“运动仿真”命令,可进入运动仿真应用模块。进行运动仿真的一般步骤为。
(1)建立运动仿真场景。
(2)设置运动仿真基本参数和环境选项。
(3)创建连杆(Link)。连杆是用户选择的几何模型,一起作为整体运动的若干几何体可作为一个连杆,并可为连杆指定材料、惯量、初始位移和转速等参数。
(4)创建运动副(Joints)。运动副为相邻两个连杆的运动约束,规定了两个连杆的相对运动,因此,机构可以认为是连接在一起运动的连杆。只有为机构指定正确的运动副,才可能得到正确的运动仿真结果。
(5)创建载荷和其他运动对象(包括力、力矩、弹簧、阻尼、弹性衬套和接触单元等),并可根据需要创建运动约束(如点在线上、点在面上等约束)。
(6)指定运动驱动。运动驱动指定了控制运动的运动副参数。UG NX的运动驱动包括无驱动、运动函数驱动、恒定驱动、简谐运动驱动和关节运动驱动5种形式。
(7)创建解算方案。每个分析场景可以创建一个或多个解算方案,每个解算方案可根据需要设置不同的参数。
(8)对创建的解算方案进行仿真计算,得到仿真结果。
(9)进行仿真结果的分析。可通过动画观察机构的运动过程,并可利用图表和曲线输出运动仿真得到的位移、速度、加速度、力和力矩等。
15.1.3 运动仿真模型管理
1.创建运动场景
在进行运动仿真之前必须建立一个运动模型,而运动模型的数据都储存在运动场景中,因此运动场景的建立是整个运动仿真过程的开始。
进入运动仿真模块后,在资源栏左上角单击标签 打开运动导航器,如图15-1所示。此时在运动导航器中显示当前装配模型的名称,选择该名称后单击鼠标右键,在弹出的快捷菜单中选择“新建仿真”命令,打开如图15-2所示的“环境”对话框,根据仿真目的设置环境参数后单击“确定”按钮,可创建默认名称为“motion_1”运动场景。重复上述操作可创建多个运动场景。
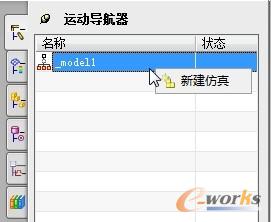
图15-1 运动导航器

图15-2 “环境”对话框
2.运动场景的管理
虽然可以利用一个装配模型创建多个运动场景,但仅可有一个运动场景为工作状态。在需要时,可在运动导航器中选择某个场景,单击鼠标右键,在弹出的快捷菜单中选择“设为工作状态”命令,可将该场景激活;另外,利用鼠标右键弹出的快捷菜单,可对运动场景进行重命名、克隆和删除等操作,如图15-3所示。
3.运动场景的环境设置
如果需要改变某个运动场景的环境设置,可首先将其设为工作状态,然后选择该运动场景,单击鼠标右键,在弹出的快捷菜单中选择“环境”命令,打开“环境”对话框更改设置。
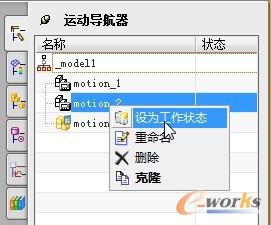
图15-3 运动场景的管理
UG NX 7.5基础应用与范例解析 第3版
- 作者:
- 李志尊
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012-01-01
- 定价:
- ¥59.80
- 京东价:¥46.20

实际售价以e-works战略合作伙伴当日售价为准