




第一十五章 运动仿真
第三节 运动副、传动副及约束
15.3.1 运动副
机构具有确定的运动,因此,在进行运动仿真时,要利用运动副将相邻连杆的相对运动进行约束。运动副限制了相邻两个连杆或连杆和大地(机架)之间的相对运动,在创建运动副时,应使其类型及方向符合机构中构件的物理连接方式,或符合设计的具体要求,以使仿真模型的运动符合机构本身的运动特点。
1.常用运动副
准确创建运动副是获得正确仿真结果的关键,常用运动副的介绍如下。
(1)“旋转副”
旋转副用来设定一个连杆绕指定轴线做旋转运动,或设定相连接的两个连杆绕指定轴线进行相对旋转,通常用于设置铰链的运动。
(2)“滑动副”
滑动副用来设定一个连杆沿指定的方向滑动,或相连接的两个连杆之间作沿指定方向的相对滑动,通常用于设置滑块的运动。
(3)“柱面副”
柱面副设定连杆沿指定的轴线进行运动(旋转或移动)。同样,可为一个连杆指定柱面副,即指定连杆和机架之间的运动关系;也可以在相连接的两个运动连杆之间设定。
(4)“螺钉(即螺旋副)”
螺旋副连接能够实现两个连杆之间进行螺旋相对运动,如丝杠、螺母之间的运动。
(5)“万向节副”
万向节副能够实现两个连杆之间绕互相垂直的两根轴作相对的转动。万向节副不能定义驱动,只能作为从动运动副。
(6)“球面坐标系(即球面副)”
球面副用于设定相连的两个连杆之间可作各个角度的相对转动,典型应用为球形铰链的运动设置。
(7)“平面的(即平面副)”
平面副用于设定两个连杆在互相接触的平面上相对滑动,并绕接触平面的法向进行相对转动。
(8)“固定的(即固定副)”
固定副阻止连杆的运动,单个具有固定副的连杆自由度为 0。可为机架或不发生相对运动的两个连杆指定固定副。
2.创建运动副的命令执行方式
在创建运动副时,需要首先打开“运动副”对话框,可通过多种方式打开该对话框。
(1)单击“运动”工具栏的“运动副”图标按钮 。
(2)在运动导航器中选择当前运动场景,单击鼠标右键,在弹出快捷菜单的“新建运动副”子菜单的级联菜单选择相应的运动副命令。
(3)如果已经在运动场景中建立有运动副,可在运动导航器中选择“Joints”节点,单击鼠标右键,在弹出快捷菜单的“新建”子菜单的级联菜单中选择相应的运动副命令。
3.创建运动副的基本步骤
“运动副”对话框如图15-7所示,利用该对话框创建运动副的一般步骤如下。
(1)确定运动副类型
如果是利用“运动”工具栏的“运动副”图标按钮 打开“运动副”对话框,需要在对话框的“类型”下拉列表框选择需要的运动副类型;如果是采用上述其他两种方式打开“运动副”对话框,则“类型”下拉列表框显示的即为指定的运动副类型。
(2)选择第一个连杆
通常需要为组成运动副的第一个连杆指定原点和方向。确认“操作”选项组的“选择连杆”为选中状态,用鼠标单击需要创建运动副的第一个连杆的任意部分,即可选中整个连杆。
系统自动指定该连杆的中心为运动副的原点,必要时可选择“指定原点”选项,然后根据需要选择对象以确定运动副原点。
指定运动副原点后,“指定方位”选项转换为选中状态,此时在图形窗口显示方位指示坐标系,如图15-8所示,可用鼠标选择某个坐标轴指定方位,也可通过选择曲线、实体的边缘等对象指定方位。
如果是创建连杆与大地(机架)之间的运动副,上述操作已完成所需运动副的创建,但如果需要创建两个运动连杆之间的运动副,需要选择组成运动副的第二个连杆。
选择“基本”选项组的“选择连杆”选项,然后单击第二个连杆的任意对象将其选中,最后在“名称”文本框设置运动副的名称,单击“确定”或“应用”按钮创建运动副。
提示:
(1)上述选择第二个连杆的操作步骤是在机构已经装配好的情况下采用的,如果机构还没有装配好,可在“基本”选项组选择“啮合连杆”复选框,然后选择第二个连杆,并为其指定运动副的原点和方向,所指定的原点和方向应与第一个连杆一致,这样,在仿真过程中两个连杆就会按设定的运动副装配到一起并进行仿真计算。
(2)虽然通过设置“啮合连杆”可将未装配好的连杆在仿真中按照需要进行计算,但操作相对复杂,而且容易出错,因此,建议将机构在完成装配后再进行运动仿真。
15.3.2 传动副
传动副用于改变扭矩的大小、控制力的输出类型,UG NX中可用的传动副包括齿轮副、齿条副和线缆副,它们都是建立在基础运动副之上的运动类型,因此,传动副没有驱动可以加载。
1.创建传动副的命令执行方式
可用以下方式执行传动副的创建命令。
(1)从“插入”主菜单“传动副”子菜单的级联菜单选择相应命令。
(2)从“运动”工具栏的耦合下拉菜单选择相应的命令,如图15-9所示。
(3)在运动导航器选择运动场景名称,单击鼠标右键,在弹出的快捷菜单中选择“新建传动副”子菜单的级联菜单。
2.传动副类型
3种传动副的作用及形式如下。
(1)齿轮副
齿轮副用于模拟齿轮传动。在传动过程中,两个齿轮分别绕各自轴线旋转,因此,齿轮副建立在现有旋转副或圆柱副的基础上,通过设定两个旋转副(或旋转副和圆柱副)之间的比率或指定接触点(即啮合点)定义传动比。
(2)齿条副
齿条副通过定义一个现有的旋转副和滑动副之间的相对运动,模拟齿轮、齿条之间的啮合传动。
(3)线缆副
线缆副定义两个滑动副之间的运动关系,可用于模拟线缆、滑轮等运动。
15.3.3 约束
在进行运动仿真时,有时需要建立一些约束以模拟机构传动,比如,需要使凸轮机构中的滚子始终与凸轮表面接触。UG NX中能够建立点在线上副、线在线上副和点在面上副3种约束。
1.创建约束的命令执行方式
可用以下方式执行约束的创建命令:
(1)从“插入”主菜单“约束”子菜单的级联菜单选择相应命令。
(2)从“运动”工具栏的约束下拉菜单选择相应的命令,如图15-10所示。
(3)在运动导航器选择运动场景名称,单击鼠标右键,在弹出的快捷菜单中选择“新建约束”子菜单的级联菜单。
2.约束类型
3种约束的作用及形式如下。
(1)点在线上副
点在线上副使两个对象保持点与线的接触,如缆车沿钢丝绳的运动。
(2)线在线上副
线在线上副使两个对象之间保持曲线接触,如凸轮机构中滚子与凸轮曲面的接触。
(3)点在面上副
点在面上副使两个对象之间保持点和曲面的接触,比如,可用来模拟汽车刮雨器的运动。
机构具有确定的运动,因此,在进行运动仿真时,要利用运动副将相邻连杆的相对运动进行约束。运动副限制了相邻两个连杆或连杆和大地(机架)之间的相对运动,在创建运动副时,应使其类型及方向符合机构中构件的物理连接方式,或符合设计的具体要求,以使仿真模型的运动符合机构本身的运动特点。
1.常用运动副
准确创建运动副是获得正确仿真结果的关键,常用运动副的介绍如下。
(1)“旋转副”
旋转副用来设定一个连杆绕指定轴线做旋转运动,或设定相连接的两个连杆绕指定轴线进行相对旋转,通常用于设置铰链的运动。
(2)“滑动副”
滑动副用来设定一个连杆沿指定的方向滑动,或相连接的两个连杆之间作沿指定方向的相对滑动,通常用于设置滑块的运动。
(3)“柱面副”
柱面副设定连杆沿指定的轴线进行运动(旋转或移动)。同样,可为一个连杆指定柱面副,即指定连杆和机架之间的运动关系;也可以在相连接的两个运动连杆之间设定。
(4)“螺钉(即螺旋副)”
螺旋副连接能够实现两个连杆之间进行螺旋相对运动,如丝杠、螺母之间的运动。
(5)“万向节副”
万向节副能够实现两个连杆之间绕互相垂直的两根轴作相对的转动。万向节副不能定义驱动,只能作为从动运动副。
(6)“球面坐标系(即球面副)”
球面副用于设定相连的两个连杆之间可作各个角度的相对转动,典型应用为球形铰链的运动设置。
(7)“平面的(即平面副)”
平面副用于设定两个连杆在互相接触的平面上相对滑动,并绕接触平面的法向进行相对转动。
(8)“固定的(即固定副)”
固定副阻止连杆的运动,单个具有固定副的连杆自由度为 0。可为机架或不发生相对运动的两个连杆指定固定副。
2.创建运动副的命令执行方式
在创建运动副时,需要首先打开“运动副”对话框,可通过多种方式打开该对话框。
(1)单击“运动”工具栏的“运动副”图标按钮 。
(2)在运动导航器中选择当前运动场景,单击鼠标右键,在弹出快捷菜单的“新建运动副”子菜单的级联菜单选择相应的运动副命令。
(3)如果已经在运动场景中建立有运动副,可在运动导航器中选择“Joints”节点,单击鼠标右键,在弹出快捷菜单的“新建”子菜单的级联菜单中选择相应的运动副命令。
3.创建运动副的基本步骤
“运动副”对话框如图15-7所示,利用该对话框创建运动副的一般步骤如下。
(1)确定运动副类型
如果是利用“运动”工具栏的“运动副”图标按钮 打开“运动副”对话框,需要在对话框的“类型”下拉列表框选择需要的运动副类型;如果是采用上述其他两种方式打开“运动副”对话框,则“类型”下拉列表框显示的即为指定的运动副类型。
(2)选择第一个连杆
通常需要为组成运动副的第一个连杆指定原点和方向。确认“操作”选项组的“选择连杆”为选中状态,用鼠标单击需要创建运动副的第一个连杆的任意部分,即可选中整个连杆。
系统自动指定该连杆的中心为运动副的原点,必要时可选择“指定原点”选项,然后根据需要选择对象以确定运动副原点。
指定运动副原点后,“指定方位”选项转换为选中状态,此时在图形窗口显示方位指示坐标系,如图15-8所示,可用鼠标选择某个坐标轴指定方位,也可通过选择曲线、实体的边缘等对象指定方位。

图15-7 “运动副”对话框
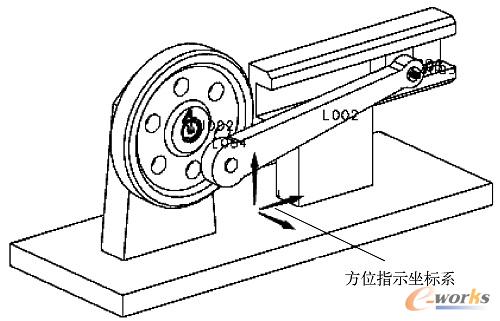
图15-8 方位指示坐标系
如果是创建连杆与大地(机架)之间的运动副,上述操作已完成所需运动副的创建,但如果需要创建两个运动连杆之间的运动副,需要选择组成运动副的第二个连杆。
选择“基本”选项组的“选择连杆”选项,然后单击第二个连杆的任意对象将其选中,最后在“名称”文本框设置运动副的名称,单击“确定”或“应用”按钮创建运动副。
提示:
(1)上述选择第二个连杆的操作步骤是在机构已经装配好的情况下采用的,如果机构还没有装配好,可在“基本”选项组选择“啮合连杆”复选框,然后选择第二个连杆,并为其指定运动副的原点和方向,所指定的原点和方向应与第一个连杆一致,这样,在仿真过程中两个连杆就会按设定的运动副装配到一起并进行仿真计算。
(2)虽然通过设置“啮合连杆”可将未装配好的连杆在仿真中按照需要进行计算,但操作相对复杂,而且容易出错,因此,建议将机构在完成装配后再进行运动仿真。
15.3.2 传动副
传动副用于改变扭矩的大小、控制力的输出类型,UG NX中可用的传动副包括齿轮副、齿条副和线缆副,它们都是建立在基础运动副之上的运动类型,因此,传动副没有驱动可以加载。
1.创建传动副的命令执行方式
可用以下方式执行传动副的创建命令。
(1)从“插入”主菜单“传动副”子菜单的级联菜单选择相应命令。
(2)从“运动”工具栏的耦合下拉菜单选择相应的命令,如图15-9所示。
(3)在运动导航器选择运动场景名称,单击鼠标右键,在弹出的快捷菜单中选择“新建传动副”子菜单的级联菜单。
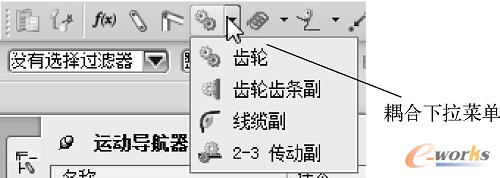
图15-9 “耦合”下拉菜单
2.传动副类型
3种传动副的作用及形式如下。
(1)齿轮副
齿轮副用于模拟齿轮传动。在传动过程中,两个齿轮分别绕各自轴线旋转,因此,齿轮副建立在现有旋转副或圆柱副的基础上,通过设定两个旋转副(或旋转副和圆柱副)之间的比率或指定接触点(即啮合点)定义传动比。
(2)齿条副
齿条副通过定义一个现有的旋转副和滑动副之间的相对运动,模拟齿轮、齿条之间的啮合传动。
(3)线缆副
线缆副定义两个滑动副之间的运动关系,可用于模拟线缆、滑轮等运动。
15.3.3 约束
在进行运动仿真时,有时需要建立一些约束以模拟机构传动,比如,需要使凸轮机构中的滚子始终与凸轮表面接触。UG NX中能够建立点在线上副、线在线上副和点在面上副3种约束。
1.创建约束的命令执行方式
可用以下方式执行约束的创建命令:
(1)从“插入”主菜单“约束”子菜单的级联菜单选择相应命令。
(2)从“运动”工具栏的约束下拉菜单选择相应的命令,如图15-10所示。
(3)在运动导航器选择运动场景名称,单击鼠标右键,在弹出的快捷菜单中选择“新建约束”子菜单的级联菜单。
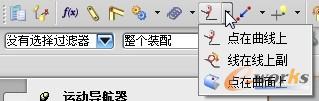
图15-10 约束下拉菜单
2.约束类型
3种约束的作用及形式如下。
(1)点在线上副
点在线上副使两个对象保持点与线的接触,如缆车沿钢丝绳的运动。
(2)线在线上副
线在线上副使两个对象之间保持曲线接触,如凸轮机构中滚子与凸轮曲面的接触。
(3)点在面上副
点在面上副使两个对象之间保持点和曲面的接触,比如,可用来模拟汽车刮雨器的运动。
UG NX 7.5基础应用与范例解析 第3版
- 作者:
- 李志尊
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012-01-01
- 定价:
- ¥59.80
- 京东价:¥46.20

实际售价以e-works战略合作伙伴当日售价为准