




第二章 轮胎力学
第五节 轮胎的动态侧偏特性
2.5.2 回正力矩的动态特性
静态的轮胎回正力矩由侧向力与轮胎拖距ξ之积给出。如第2.5.1小节所述,侧向力相对于侧偏角的瞬时响应可用一个一阶延迟环节来描述。因此,由此侧向力产生的回正力矩Ms的响应也可用一阶延迟环节来近似。设此时的时间常数为

在此情况下,当轮胎突然产生一个侧偏角时,轮胎自身将产生扭曲变形。由这种扭曲变形引起的力矩将构成瞬时轮胎回正力矩的一部分。轮胎的扭转角在侧偏角β产生的瞬间达到最大值,其大小与侧偏角一致。然而随后,扭转角会随着轮胎的转动而减小,在稳定状态变为零。因此,由轮胎的扭转而产生的力矩Mt相对于侧偏角的响应可以如下的一阶延迟环节来近似表示:

式中,kt为轮胎的扭转刚度。
由上可知,轮胎的回正力矩M作为Ms与Mt之和,可由下式表示:
其频率响应为
图2.41给出了回正力矩相对于ω/V的频率响应的测量数据。图中曲线的形状证实了式(2.92)的近似结果是合理的。
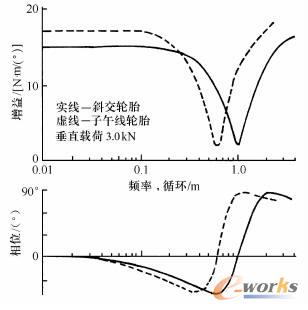
图2.41 回正力矩对侧偏角的频率响应
车辆操纵动力学
- 作者:
- (日)安部正人
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012年7月
- 定价:
- ¥69.80
- 京东价:¥55.80

实际售价以e-works战略合作伙伴当日售价为准