




第三章 装配过程规划实例操作
第二节 装配路径规划
(9)定义蜗轮轴、左端轴承及2个平键的运动
选择蜗轮轴及左端轴承、平键26×5、平键16×5,移到箱体外,如图3-39所示。
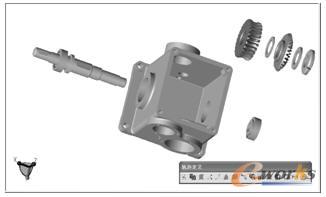
图3-39 定义蜗轮轴、左端轴承及平键26×5、平键16×5的运动
(10)定义平键26×5的运动
选择“平键26×5”,沿Z轴方向移动到合适位置,如图3-40所示。
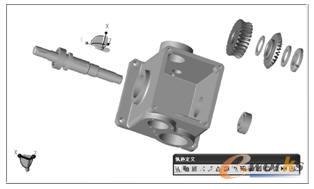
图3-40 定义平键26×5的运动
(11)定义平键16×5的运动
选择“平键16×5”,沿Z轴方向移动到合适位置,如图3-41所示。

图3-41 定义平键16×5的运动
(12)定义左端轴承的运动
左端轴承拆卸后的效果如图3-42所示。
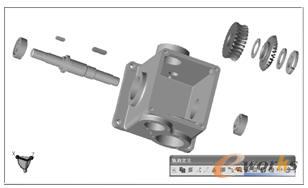
图3-42 定义左端轴承的运动
(13)定义蜗轮轴的运动
选择“蜗轮轴”,沿轴向方向移动一小段距离,单击【轨迹定义】工具条上的按钮 结束定义,如图3-43所示。
结束定义,如图3-43所示。

图3-43 定义蜗轮轴的运动
(14)对工序“安装蜗轮”进行装配仿真
选择“安装蜗轮”节点,单击【操作】工具栏中【装配仿真】按钮 ,进行单步骤装配仿真,可以看到本道工序所有零件的安装过程。
,进行单步骤装配仿真,可以看到本道工序所有零件的安装过程。
(15)记录观察方位
在装配仿真时,为了以最佳视角观察某道工序的装配过程,可以在定义活动时设置记录观察方位,这样在仿真播放时可以准确地切换到这个方位。
①在装配结构树中,选择步骤节点或活动节点。
②通过罗盘调整好方位,选择右键菜单中的【记录观察方位】命令,或单击【操作】工具栏中【工艺过程】/ 按钮,节点图标由
按钮,节点图标由 变成
变成 。
。
本样例中在定义工序“安装蜗轮”装配过程时,按图3-22所示调整好方位后,在步骤上记录观察方位。当模型为其他方位时,选择节点“安装蜗轮”,则会显示记录的方位。
开目3DCAPP三维装配工艺设计基础教程

- 作者:
- 彭义兵等
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2014-3
- 定价:
- ¥42.00
- 京东价:暂无报价

实际售价以e-works战略合作伙伴当日售价为准