2.дМЪјЖЏЛ
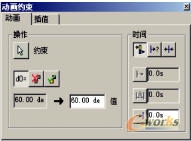
етИіЛњаЕЪжЪЧгЩЕззљЁЂМчЁЂДѓБлЁЂаЁБлЁЂЪжЭѓЁЂЪжжИЕШЖрИіСуВПМўзАХфЖјГЩЕФЃЌУПвЛИіСуМўЖМгаИїздЕФЖЏзїЁЃЮвУЧЯШРДзіДѓБлЕФЖЏЛ:дкЭМаЮДАПкжагвЛїДѓБлСуМўЃЌдкЯТРПђжабЁдёЁАдкфЏРРЦїжаВщевЁБЃЌетЪБфЏРРЦїжабЁжаСЫЮФМўЁАRobotЁЊЁЊДѓБл:1"ЃЌЕуПЊЮФМўЧАЕФЁА+ЁБКХЃЌеЙПЊНкЕуЁЃгвЛїЕквЛИізгНкЕуЁАДѓаЁБлЮВЖШani"ЃЌдкгвМќВЫЕЅжабЁдёЖЏЛдМЪј(ШчЭМ3)ЃЌЕЏГіЖЏЛдМЪјЖдЛАПђ(ШчЭМ4)ЃЌМЄЛюжИЖЈдМЪјжЕd0=ЃЌдкжЕЧАУцЕФЪфШыПђРяЪфШыЁА85.OOdeg"ЃЌЫЕУїАбдМЪјЮВЖШгЩдРДЕФЁА60degЁБИФБфЕНЁА85deg"ЁЃШЛКѓМЄЛюЁАздЩЯИіВйзїЕФПЊЪМЪБМфЁБЃЌдкАДХЅЁАНсЪјЪБМфЁБКѓЪфШыЁА2s"ЃЌШЗзуВЂЭЫГіЁЃ

ЭМ3 дМЪјЯТРВЫЕЅ
ЭМ4 ЖЏЛдМЪјЖдЛАПђ
гУЭЌбљЕФЭђЗЈЩшжУЕззљЁЂМчЁЂаЁБлЁЂЪжЭѓЁЂЪжжИЕШИїИіСуВПМўЕФдМЪјЖЏЛЃЌЫќУЧЕФЩшжУЪ§жЕЗжБ№ШчЯТ:
RobotЁЊЁЊДѓБл:1
ДѓаЁБлЮВЖШ:Os~2sЮЊ60deg~85degЃЌ2s~2.5sЮЊ85deg~91degЃЌ3s~5sЮЊ91degвЛ93degЁЃ
МчБлМаЮВ:Os~2sЮЊвЛ45deg~-50degЃЌ2s~2.5sЮЊ-50deg~-55deg3s~5sЮЊ-55deg~-45degЁЃ
RobotЁЊЁЊаЁБлЃК1
ДѓаЁБлНЧЖШ:ЭЌЁАRobotЁЊЁЊДѓБл:1ЁБЕФДѓаЁБлЮВЖШБфЛЏЁЃ
ЭѓзЊЮВani:0s~2sЮЊOdeg~36degЃЌ3s~5sЮЊ36deg~54.5degЁЃ
RobotЁЊЁЊЭѓ:1
жИа§зЊani:Os~2sЮЊ90deg~OdegЁЃ
ЭѓзЊЮВani:ЭЌЁАRobotвЛаЁБл:1ЁБЕФЭѓзЊЮВБфЛЏЁЃ
RobotЁЊЁЊМч:1
МчБлМаЮВ:ЭЌЁАRobotвЛДѓБл:1ЁБЕФМчБлМаЮВБфЛЏЁЃ
RobotЁЊЁЊжИ:2
жИа§зЊany:ЭЌЁБRobot-Эѓ:1ЁБЕФжИа§зЊБфЛЏЁЃ
RobotЁЊЁЊжИЦјИз:1
жИПЊКЯani:2s~3sЮЊ35mm~lOmmЃЌ7s~7.5sЮЊlOmm~25mmЁЃ
RobotЁЊЁЊжИЛюШћ:1
жИПЊКЯani:ЭЌЁАRobotвЛжИЦјИз:1ЁБЕФжИПЊКЯЁЃ