




第五章 3DCAPP-A系统高级功能
第八节 机构运动仿真
⑦“共轴”和“固定”约束关系定义完成后,需要定义连杆运动中主动的零件绕轴旋转的运动轨迹。定位夹在“part2”零件的中间,如果要定义“part2”绕“part1”和“part2”间的轴线旋转,需要将定位夹原点移到“part1”的孔的中线点。单击【轨迹定义】工具条中的按钮 ,选中定位夹原点,原点加亮显示,如图5-137所示,然后按住〈Alt〉键,将鼠标移动到“part1”的孔的上边缘,上圆弧将加亮显示且中心点显示出来,如图5-138所示,单击鼠标左键,定位夹原点移动到圆弧的中心点,如图5-139所示,再次单击【轨迹定义】工具条中的按钮
,选中定位夹原点,原点加亮显示,如图5-137所示,然后按住〈Alt〉键,将鼠标移动到“part1”的孔的上边缘,上圆弧将加亮显示且中心点显示出来,如图5-138所示,单击鼠标左键,定位夹原点移动到圆弧的中心点,如图5-139所示,再次单击【轨迹定义】工具条中的按钮 ,完成定位夹的定位。
,完成定位夹的定位。

图5-137 选中定位夹原点

图5-138 圆弧的中心点显示出来
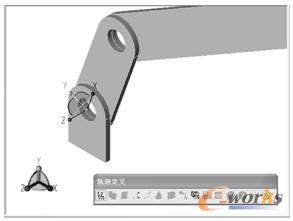
图5-139 定位夹原点移动到圆弧的中心点
⑧定义“part2”绕Z轴旋转:选中定位夹上X、Y轴间的红色圆弧,圆弧加亮显示呈白色,如图5-140所示,定义“part2”绕Z轴逆时针旋转几周,单击【轨迹定义】工具条中的按钮 ,完成定义。仿真播放效果如图5-141所示。
,完成定义。仿真播放效果如图5-141所示。
开目3DCAPP三维装配工艺设计基础教程

- 作者:
- 彭义兵等
- 类别:
- 产品创新数字化
- 出版社:
- 机械工业出版社
- 出版时间:
- 2014-3
- 定价:
- ¥42.00
- 京东价:暂无报价

实际售价以e-works战略合作伙伴当日售价为准