【例13-1】 工作台-电动机系统谐响应分析。
13.5.1 问题描述
如图13-7所示的工作台-电动机系统,当电动机工作时由于转子偏心引起电动机发生简谐振动,这时电动机的旋转偏心载荷是一个简谐激励,计算结构在该激励下的响应。已知条件为:
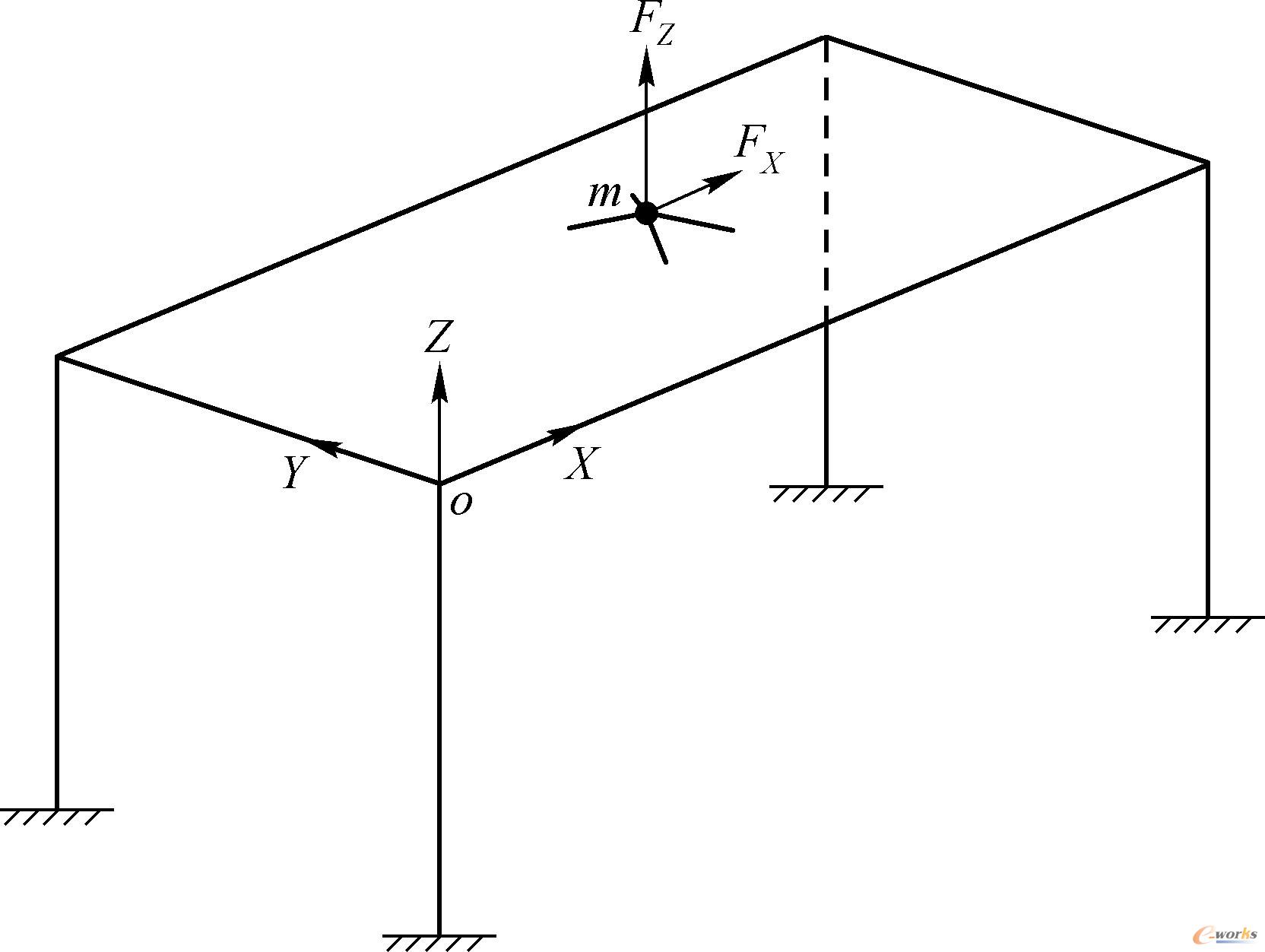
图13-7 工作台-电动机示意图
工作台面板:长=2m(X方向),宽=1m(Y方向),厚=0.02m(Z方向)。
工作台4条腿的梁几何特性:长=1m(Z方向),截面宽度=0.01m(X方向),截面高度=0.02m(Y方向)。
电动机质心位于工作台正上方0.1m,电动机质量:m=100kg。
简谐激励Fx、Fz的幅值为100N,Fz落后Fx90°的相位角。
电动机转动频率范围为0~10Hz。
所有的材料均为钢,其特性:杨氏模量为2.1×1011Pa,泊松比为0.3,密度为7850kg/m3。
说明:本例采用国际单位制。
13.5.2 网格划分
本例的几何模型较简单,可直接在HyperMesh中建立面和线的模型,再划分网格。
1)将工作台的台面划分为200个四边形单元,并放置于table组件集。
2)将每个支腿划分为10个一维单元,并放置于leg组件集。
3)建立质量单元,并放置于mass组件集。
4)采用刚性连接CERIG将mass单元与桌面4个角点连接,并放置于cerig组件集。
注意:
① 对于本例,梁单元与板壳单元的连接可采用节点耦合法。
② CERIG需耦合6个自由度。

图13-8 工作台-电动机的有限元网格模型(含边界条件)
13.5.3 单元定义
1)工作台的台面选用SHELL181单元,并设置K3=2,采用非协调模式的完全积分方法,以提高计算精度。
2)支腿选用BEAM188单元,并设置K3=3,设置单元形函数为三次式,以获取较高的计算精度。
3)电动机选用MASS21单元,无需设置单元选项。
注意:cerig组件中定义了刚性区域,由ANSYS自动生成约束方程,不需定义单元类型、实常数和材料等属性。
13.5.4 设置实常数
1)设置SHELL181单元的实常数TKI(1)=0.02m,以定义工作台台面的厚度。
2)设置MASS21单元的实常数MASSX(1)=100kg,MASSY(2)=100kg,MASSZ(3)= 100kg,忽略转动惯量。
13.5.5 定义梁截面
支腿截面为矩形,定义截面的方法详见例3-2。需要注意的是,截面类型应选择RECT,并设置Dimension(a)=0.02m,Dimension(b)=0.01m。
13.5.6 材料定义
所有的材料均为钢,杨氏模量EX为2.1E11Pa,泊松比NUXY为0.3,密度DENS为7850kg/m3。
13.5.7 边界条件定义
4个支腿固定在地面,约束支腿底部(共4个节点)的6个自由度,并将约束载荷放置于载荷集constraints中,如图13-8所示。
ICP经营许可证:鄂B2-20080078
(于2003年首获许可证:鄂B2-20030029)
鄂公网安备:420100003343号
© 2002-2025 武汉制信科技有限公司 版权所有
投诉举报电话:027-87592219
















 需求中心
需求中心 AI助手
AI助手
 联系我们
联系我们