




第二章 第2章 轮胎力学
第四节 2.4 驱动和制动情况下轮胎的侧偏特性
第231小节中,我们已根据Fiala理论解释了轮胎的侧偏特性。所采用的数学模型假设:伴随着轮胎侧向滑动,其胎面基底相对于其轮辋发生侧向弹性变形,同时胎面橡胶相对于胎面基底进一步发生侧向弹性变形。
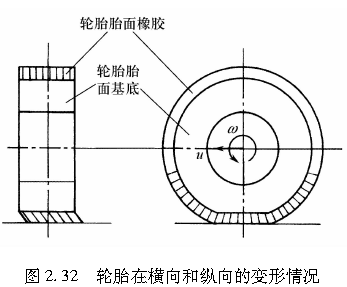
同样采用这个数学模型,我们可以考察纵向力(如驱动力和制动力)的影响,但模型会变得过于复杂。取而代之的是,根据图2.32表示的轮胎胎面橡胶环绕刚性轮辋的情形,我们将轮胎胎面基底作为唯一的弹性部分。这样的轮胎模型允许同时在纵向和侧向考察弹性变形。与前面的模型相似,认为这个轮胎胎面橡胶并非环状的连续体,而是由沿轮胎周向的独立的无数弹性体组成的。我们称该轮胎模型为刷子模型。
下面我们采用这个轮胎模型,从理论上理解轮胎在纵向及侧向产生的力[3]。
242驱动和制动情况下轮胎的侧向力
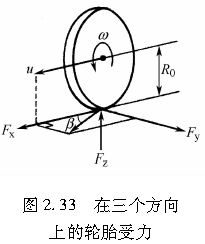
如图2.33所示,设轮胎以角速度ω旋转,并同时沿与其回转平面成β角的方向行驶,其回转面方向的速度分量为u。我们称作用于轮胎的三个力分别为纵向力Fx、侧向力Fy和垂向力Fz。
1制动情况下
如图2.34所示,设轮胎接地区中心线的前端为坐标原点,并取纵向为x轴、侧向为y轴。另设O点正上方的轮胎胎面基底处的点为O′。经过时间Δt,接地点从O点移动到P点,轮胎胎面基底的点从O′点移动到P′点。将P′点在x轴上的投影记为P″点。
在Δt时间内,自O点进入的接地点在x轴方向上前进的距离,即P点的x坐标为

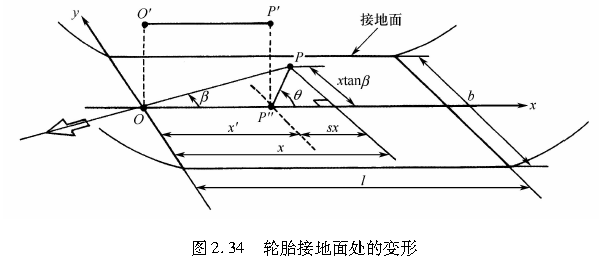
自O′点进入的点P″的x坐标为

因此,P点和P′点在x方向上的相对位移,即轮胎胎面橡胶的变形为
这里的s为轮胎纵向滑移率,等于:

并且自O点进入的接地点在y方向上的位移,即P点的y坐标为

由于P′点在y方向上无位移,因而它就是轮胎胎面橡胶在y方向上的变形。
因此,作用于P点每单位长度在x方向的力σx和每单位宽度在y方向上的力σy分别为
式中,力的正负号与x轴和y轴的正负方向相反。此外,二者合力的大小为

式中,Kx为轮胎胎面橡胶单位长度的纵向刚度;Ky为单位宽度的侧向刚度。
当轮胎产生纵向滑移率及侧偏角后,轮胎会发生变形。结果形成与x′成比例的轮胎接地区力的分布。
设轮胎接地压力分布与第231小节中的相同,有

如图2.35所示,在0≤x′≤x′s的附着区范围内,作用于轮胎接地区的力由式(2.50)表示;在x′≥x′s的滑移区范围内则以μp表示。
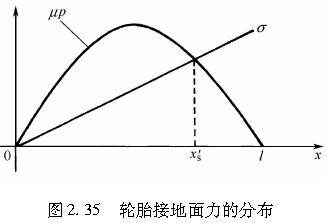
在附着区范围内,作用于接地区x方向和y方向上的力分别为σx和σy;在滑移区范围内,相应的作用力则分别为μpcosθ和μpsinθ,这里的θ决定了轮胎侧滑的方向。
将σ=μp代入式(2.50)和式(2.51)中,求解x′s,并假设一个无量纲量ξs为

其中,


由上可知,作用于轮胎整个接地面在x方向和y方向上的力表述如下:
当ξs>0时,对由附着区和滑移区组成的接地区,有
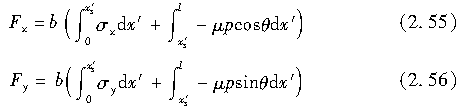
而当ξs≤0时,即对只存在滑移区的接地面,有
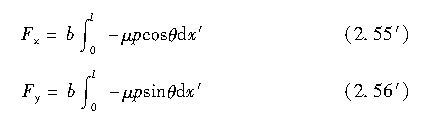
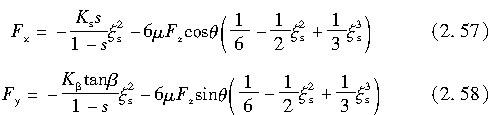
将式(2.50)~式(2.52)代入式(2.55′)~式(2.56′),可求得Fx和Fy如下:
当
则,
当
则,

这里,假定滑移力的方向θ近似为滑动起始点处的滑移方向,即
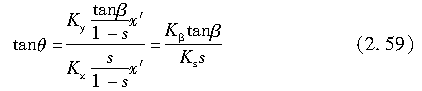
故得:

由式(2.54)定义的Ks相当于在β=0、s→0时单位纵向滑移率所对应的纵向力的总和;而Kβ相当于β→0、s=0时单位侧偏角对应的侧向力的总和。以上结论也可在Ks和Kβ很小且β=0或s=0时,通过对接地区的作用力积分得到。式(2.57)和式(2.58)分别证实了(αFx/αs)s=0,β=0=Ks、(αFy/αβ)s=0,β=0=Kβ。因此,如果要用我们描述的模型将Fx和Fy用于数值模拟,一个实际的做法是,依照轮胎垂直载荷、根据实验来确定Ks和Kβ。
由于摩擦系数μ是轮胎垂直载荷Fz和滑移速度Vs的函数,因此期望有一个能反映μ对轮胎载荷和滑移速度的经验公式。这里,我们定义Vs为

如式(2.63)所示,作为纵向滑移率s、侧偏角β、轮胎载荷Fz和轮胎行驶速度u的函数,轮胎的纵向力和侧向力可以通过数值求解获得,即

2驱动情况下
与制动时相同,考虑轮胎胎面橡胶相对于轮胎胎面基底的变形,则有
式中,s为加速过程中轮胎的纵向滑动率。

故有
参照制动时的情况,由下述公式求出附着区和滑动区的边界点:
在加速情况下,推导得出在x方向和y方向作用于轮胎接地区的力如下:
当
则,

当
则,

其中,

并且滑动速度为

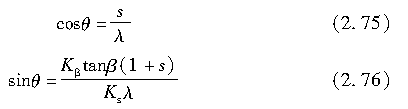
以式(2.57)~式(2.58′)及式(2.72)~式(2.73′)求得的驱动和制动时作用于侧滑轮胎的纵向力和侧向力由图2.36所示。
清晰地可见,这里所进行的理论分析很好地解释了在第232小节第五部分中所述的关于驱动力和制动力对轮胎侧偏特性的影响。
243驱动和制动情况下轮胎的回正力矩
如第231小节所述,作用于接地区的侧向力相对于接地面中心是非对称的。因此,会产生一个绕轮胎接地面中心铅垂轴的力矩。当纵向力和侧向力同时作用时,由于轮胎的侧向变形,纵向力的作用点与轮胎中心线之间将产生偏离,并产生一个由纵向力引起的一个回正力矩。这些力矩的总和即为回正力矩。
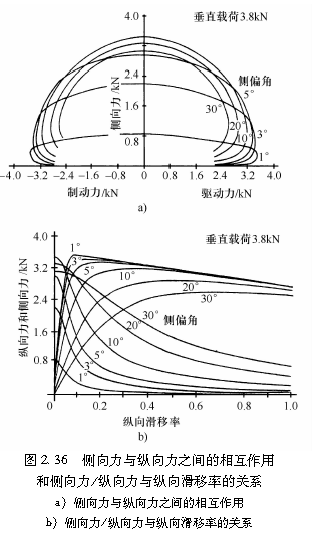
作用于接地区某点单位宽度、单位长度的力σx和σy如图2.37所示。
上述的回正力矩可写成绕P点的力矩总和,即:

将接地区划分为附着区和滑动区,并将式(2.78)具体化,则有:

式(2.79)中的第1、2项的积分表示由侧向力引起的回正力矩,而第3、4项的积分则表示由纵向力引起的回正力矩。
利用式(2.47)~式(2.49)或者式(2.65)、式(2.67)、式(2.68)和式(2.51),可积分求解得到回正力矩,具体如下:
1制动情况下(s>0)
2加速情况下(s<0)
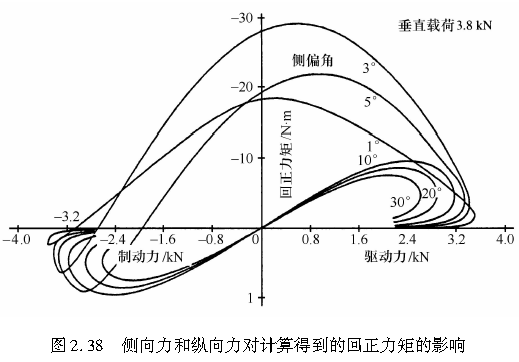
图2.38绘出了利用式(2.80)~式(2.83)计算驱动力和制动力与回正力矩关系的结果。与轮胎侧向力的情形不同,回正力矩在驱动和制动时有很大的不同,且随驱动力或制动力以及侧偏角的变化呈现相当复杂的变化规律。
例题22
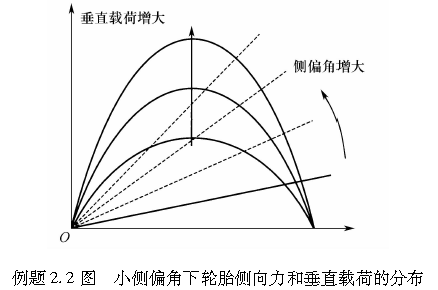
试利用侧向力和垂直载荷分布示意图论证,对沿着纵向带有一小侧偏角的轮胎而言,由该小侧偏角引起的侧向力与侧偏角之间成比例关系。并证实,二者之间的比例关系与垂直载荷基本无关,而是取决于轮胎的侧偏刚度。
题解:例题2.2图为小侧偏角情况下轮胎侧向力和垂直载荷的分布示意图,其中的直线表示由轮胎胎面橡胶的侧向变形而产生的侧向力,而抛物线则表示垂直载荷与摩擦系数之积的分布情况。显然由图可见,由直线和一条抛物线围成的区域表示轮胎的侧向力。当侧偏角很小时,轮胎垂直载荷的变化对其几乎没有影响;而且该区域可近似看成一个三角形,因而其面积基本与侧偏角成比例关系。由于该三角形主要取决于由轮胎胎面橡胶的侧向变形,因此由侧向变形引起的力也直接取决于轮胎的侧偏刚度。
例题23
假如轮胎垂向接地压力在接地区上沿纵向为均匀分布,试推导出制动时轮胎的纵向力Fx和侧向力Fy。
题解:由于垂向接地压力为均匀分布,则式(2.51)可变为

由于满足σ=μp的x′点是粘着域和滑动域的分界点,将上式和式(2.50)代入σ=μp,可得如下方程:

由于Ks=bl2Kx/2,Kβ=bl2Ky/2,上式可变形为:

故得:

按第242小节第五部分中的处理过程,可得Fx和Fy如下:
当ξs≥1时,不存在滑动区,故有
当ξs≤1时,同时存在附着区和滑动区,故有
车辆操纵动力学
- 作者:
- 安部正人
- 类别:
- 先进制造技术
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012年7月
- 定价:
- ¥69.80
- 京东价:¥50.30

实际售价以e-works战略合作伙伴当日售价为准