




第二章 第2章 轮胎力学
第五节 2.5 轮胎的动态侧偏特性
在第2.3节和第2.4节中,我们从理论上考察了轮胎的侧偏特性,所用的数学模型考虑了轮胎接地区部分的微小变形。但如果动态的侧偏特性也采用这些模型分析的话,就变得太复杂了。取而代之的是,我们将下面的研究仅限于小侧偏角范围,利用处理侧向变形的宏观轮胎模型考察其侧向力和回正力矩的瞬时响应。
251侧向力的动态特性
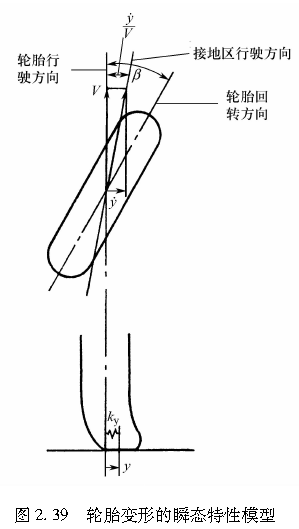
如图2.39所示,当沿着轮胎回转方向行驶而突然产生一个侧偏角β时,在轮胎上会产生一个侧向力,并且接地面只在侧向产生大小为y的变形。此时,接地区的侧向速度为 ,并由图2.39可知,接地区的侧偏角为
,并由图2.39可知,接地区的侧偏角为 。
。
设F为轮胎的侧向力,K为侧偏刚度,则有
如果定义轮胎侧向刚度为ky,则得:
由上两式消去y,可得:
对上式进行拉普拉斯变换,并用侧向力相对于侧偏角的传递函数来表示,则有

侧向力相对于侧偏角的响应可用以T1=K/kyV为时间常数的1阶延迟环节来近似。
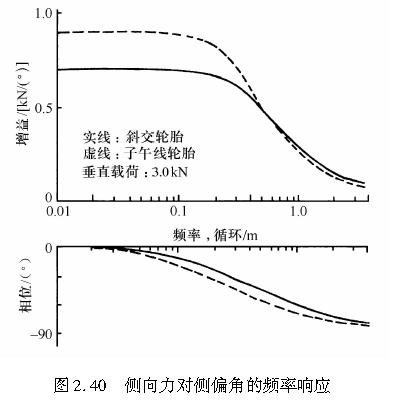
用jω替代式(2.87)中的s,可得侧向力的频率响应如下:

由式(2.88),侧向力相对于侧偏角的频率响应可看成是相对于距离频率,而非时间频率ω(rad/s)。图2.40即为这样的频率响应的测量实例。可见,响应可用一阶延迟环节来准确地近似表示。
252回正力矩的动态特性
静态的轮胎回正力矩由侧向力与轮胎拖距ξ之积给出。如第251小节所述,侧向力相对于侧偏角的瞬时响应可用一个一阶延迟环节来描述。因此,由此侧向力产生的回正力矩Ms的响应也可用一阶延迟环节来近似。设此时的时间常数为

在此情况下,当轮胎突然产生一个侧偏角时,轮胎自身将产生扭曲变形。由这种扭曲变形引起的力矩将构成瞬时轮胎回正力矩的一部分。轮胎的扭转角在侧偏角β产生的瞬间达到最大值,其大小与侧偏角一致。然而随后,扭转角会随着轮胎的转动而减小,在稳定状态变为零。因此,由轮胎的扭转而产生的力矩Mt相对于侧偏角的响应可以如下的一阶延迟环节来近似表示:

式中,kt为轮胎的扭转刚度。
由上可知,轮胎的回正力矩M作为Ms与Mt之和,可由下式表示:
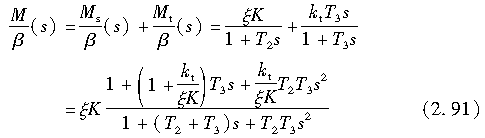
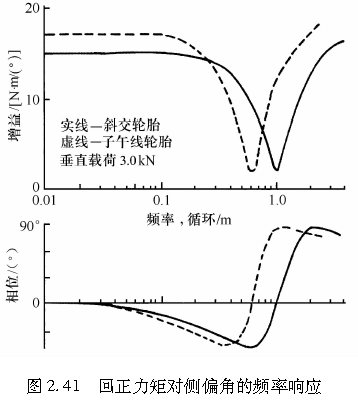
其频率响应为

图2.41给出了回正力矩相对于ω/V的频率响应的测量数据。图中曲线的形状证实了式(2.92)的近似结果是合理的。
车辆操纵动力学
- 作者:
- 安部正人
- 类别:
- 先进制造技术
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012年7月
- 定价:
- ¥69.80
- 京东价:¥50.30

实际售价以e-works战略合作伙伴当日售价为准