




第二章 第2章 车辆简化模型及振动
第五节 2-5 “人车”三自由度系统的振动
2.5.1“人-车”系统振动模型
在单轮模型基础上,增加乘员座椅模型,即为考虑乘员座椅的单轮模型,如图2-17所示。
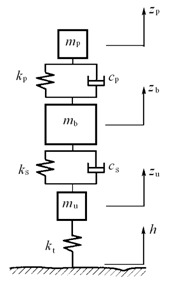
图2-17 考虑乘员座椅的单轮模型
图2-17中,mb为一个单轮上对应的车身质量,即簧上质量;ks为车身悬架弹性系数;cs为车身悬架阻尼系数;mp为一个车轮上对应的座椅和人体质量;kp和cp分别是座椅弹性系数和阻尼系数;mu为簧下质量,kt为轮胎刚度。
对于图2-17所示的三质量振动系统,其振动微分方程为
 (2-76)
(2-76)
 (2-77)
(2-77)
 (2-78)
(2-78)
①
 ,座椅-人体无阻尼固有频率;
,座椅-人体无阻尼固有频率;②
 ,车身无阻尼固有频率;
,车身无阻尼固有频率;③
 ,座椅-人体阻尼比;
,座椅-人体阻尼比;④
 ,车身阻尼比;
,车身阻尼比;⑤
 ,车身与人体的质量比;
,车身与人体的质量比;⑥
 ,簧上与簧下的质量比;
,簧上与簧下的质量比;⑦
 ,轮胎次切距,约等于轮胎静挠度;
,轮胎次切距,约等于轮胎静挠度;⑧
 ,在无耦合、无阻尼的车轮固有频率;
,在无耦合、无阻尼的车轮固有频率;⑨
 (簧下质量阻尼比)
(簧下质量阻尼比)根据式(2-76)~式(2-78),可以求出对行驶安全性有重要影响的车轮动载荷为
 (2-79)
(2-79)
2.5.2振动响应传递特性
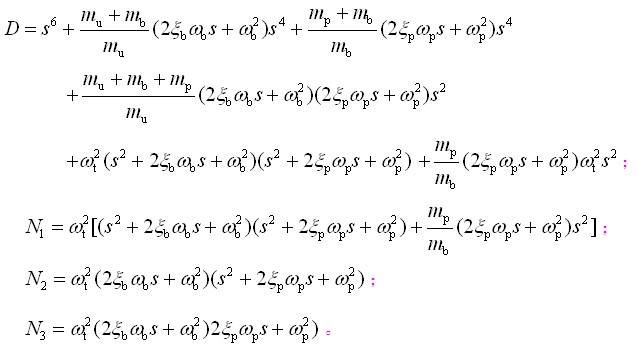
为求出各响应量对路面不平度q的频率响应函数,对式(2-76)~式(2-78)两边求拉氏变换,其中,振动响应位移zu,zb和zp的付氏变化分别为Zu,Zb和Zp,路面不平度q的付氏变化为Q。因此,可求的振动位移响应zu,zb和zp对路面不平度输入q的传递函数,它们分别为
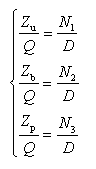 (2-80)
(2-80)
 ,
,令zu,zb和zp传递函数式(2-79)中的s=jω,即得到振动位移响应zu,zb和zp对路面不平度输入q的频率响应函数,即
 (2-81)
(2-81)
 (2-82)
(2-82)
汽车减振器设计与特性仿真
- 作者:
- 周长城
- 类别:
- 先进制造技术
- 出版社:
- 机械工业出版社
- 出版时间:
- 2012年5月
- 定价:
- ¥56.80
- 京东价:¥42.60

实际售价以e-works战略合作伙伴当日售价为准