3) дйдкфЏРРЦїжабЁЖЈгаЙиСуМўЛђзгзАХфЃЈВлТж.IPTЁЂВІХЬ.IPTЃЉЃЌжЎКѓдкгвМќВЫЕЅжаНЋЁАНгДЅМЏКЯ(S)ЁБбЁЯюЩшжУГЩгааЇ
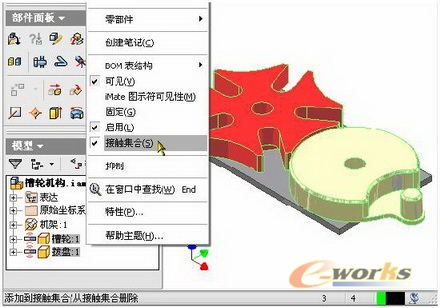
ЭМ1-7 ЁАНгДЅМЏКЯЁБЩшжУ
4) зюКѓдкФЃаЭфЏРРЦїжаЕФВІХЬСуМўЯТевЕНдМЪјЁАзЊЖЏЧ§ЖЏЁБЃЌШЛКѓгвМќЁАзЊЖЏЧ§ЖЏЁБ ?Ч§ЖЏдМЪјЃЌЧ§ЖЏВІХЬзЊЖЏ
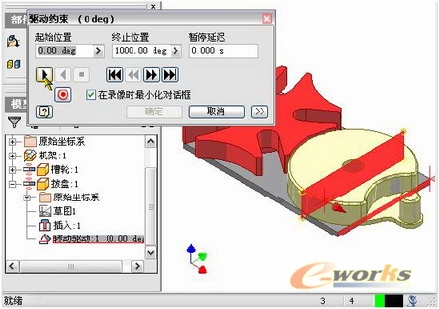
ЭМ1-8 Ч§ЖЏдМЪј
ПЩвдПДЕНЃЌВлТжСНТждкНгДЅДІВњЩњСЫЁАНгДЅЫцЖЏЁЂЭбРыОВжЙЁБЕФНсЙћЁЃВІХЬзїСЌајЛизЊдЫЖЏЃЌПЊга5ИіЕШЗжЕФОЖЯђВлЕФВлТжБЛВІХЬЕФдВжљЯњЭЦЖЏзїМфаЊдЫЖЏЁЃЕБВІХЬЩЯЕФдВжљЯњНјШыОЖЯђВлжЎЧАЃЌВлТжЩЯЕФФкАМЫјжЙЛЁБЛВІХЬЩЯЕФЭтЭЙдВЛЁЫјзЁЃЌВлТжОВжЙВЛЖЏЁЃ
ЕуЦРЃКМфЯЖЛњЙЙЁЂжгБэЧмзнТжЖМЪєгкетвЛРрЃЌетЪЧInventorзАХфЙІФмЕФИФНјЃЌвВЪЧЖдЙЄГЬЬѕМўБэДяЕФНјвЛВНжЇГжЁЃЖдгквЛаЉБШНЯИДдгЕФЧщПіЃЌвВФме§ШЗЕУЕНЖЏзїФЃФтЁЃЕЋЪЧЃЌПЩФмЪЧвђЮЊЫуЗЈЕФдвђЃЌЖдгкЁАФкЁЂЭтВрУцНгДЅЁБЕФЧщПіЃЌР§ШчСДЬѕФПЧАЛЙВЛФме§ШЗДІРэЁЃетИіЙІФмдкЖўЮЌЛђЖўЮЌАыЕФЧщПіЯТФмБэЯжНЯКУЃЌЕЋдкДПШ§ЮЌЛЗОГЛЙВЛааЁЃ
АИР§ЫФЃКдМЪјЧ§ЖЏгыШсад
КмЖрЪБКђЃЌгаЖЏзїЕФзгзАХфЃЈР§ШчгЭИзЁЂЦјИзЁЃЉГЃдкЭЌвЛИіЛњЦїЕФзмзАжаБЛЖрДЮЪЙгУЁЃдкЛњЙЙЖЏзїФЃФтжаЃЌетжжЭЌвЛзгзАХфгаЖрИів§гУЃЌЧвЖрИів§гУПЩФмгаВЛЯрЭЌЕФЖЏзїЁЃНіЪЙгУздЪЪгІЩшжУЃЌВЛФмТњзуетжжЭЌбљЕФзгзАХфдкзмзАЕФВЛЭЌЮЛжУЯТгаВЛЭЌЖЏзїЕФЪЙгУЁЃШсадВПМўОЭЪЧНтОіетжжашЧѓЕФЁЃ
вЊЩшжУШсадВПМўЃЌПЩдкЯргІзгВПМўЩЯЕЅЛїЪѓБъгвМќЃЌбЁдёЁАШсадЁБЃЌжЎКѓзїГізАХфдМЪјЁЃетбљЃЌЭЌвЛИізгзАХфЃЌдкзмзАХфжаПЩвдЪЙгУЖрДЮЃЌВЂЧвИїздЕФЖЏзїПЩвдВЛЭЌЁЃЯТУцвдЭкОђЛњФЃаЭЮЊР§НјааЫЕУїЁЃ
ЪЕЯжЙ§ГЬЃК
1) ДђПЊзАХфФЃаЭ(ЭкОђЛњ-1.iam)ЃЌЮвУЧПЩвдПДЕНИУзАХфжавбОДцдкСНИіЮДМгдМЪјЕФгЭИззгзАХфв§гУ
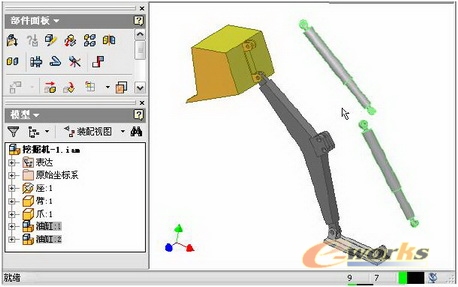
ЭМ1-9 ЭкОђЛњФЃаЭ