2) 在浏览器中选中油缸的两个引用,右键并将“柔性”设置成有效
图1-10 “柔性”设置
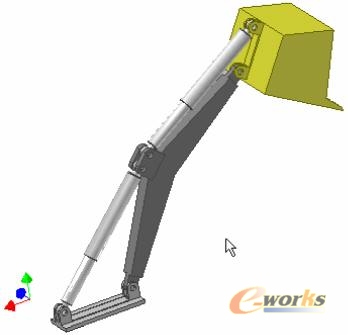
3) 添加装配约束,将两个油缸装配到总装上,结果应如图1-11所示
图1-11装配约束完成
4) 在模型浏览器中选中“爪角度”约束进行驱动。可以看到,当一个油缸引用有动作时,并不影响另一个的状态
图1-12 驱动约束